|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENCYCLOPÉDIE DE LA RADIOÉLECTRONIQUE ET DU GÉNIE ÉLECTRIQUE L'évolution des alimentations pulsées flyback
Encyclopédie de l'électronique radio et de l'électrotechnique / Alimentations L'article porté à la connaissance des lecteurs est consacré aux alimentations à découpage flyback, largement utilisées dans les alimentations pour téléviseurs, ordinateurs et autres équipements électroniques. Ces sources sont également populaires parmi les radioamateurs. L'article se concentrera sur les alimentations assemblées sur les microcircuits KR1033EU10 et VIPer-100A, et leur calcul à l'aide d'un progiciel spécialisé. CONTRÔLEUR PWM KR1033EU10 (iC3842) Les alimentations à découpage (SMPS) se sont généralisées au milieu du siècle dernier. Et aujourd’hui, les IIP subissent des changements évolutifs presque chaque année. Chaque classe de SMPS, une fois conquise sa niche, y reste pour toujours, ou du moins pendant longtemps, et se développe de manière presque indépendante. Aussi puissants (150 W ou plus), les SMPS pont sont généralement utilisés. Les SMPS à fonctionnement inversé sont plus souvent utilisés en tant que puissance faible et moyenne (jusqu'à 150 W). Aujourd'hui, la base élémentaire de ces sources est mise à jour si rapidement qu'un radioamateur ordinaire et l'industrie nationale de la radio suivent avec beaucoup de retard ces changements dans leurs développements. Les contrôleurs PWM intégrés KR1033EU5 (analogue étranger - TDA4605), décrits dans l'article [1], n'ont pas encore été introduits dans les appareils électroménagers, car dans les équipements vidéo étrangers, et en particulier les moniteurs vidéo, leur nouvelle variété est déjà largement utilisée - UC3842, KA3842 et UC3844, KA3844 (analogues nationaux de KR1033EU10 et KR1033EU11, respectivement). Extérieurement et fondamentalement semblables au prototype, les contrôleurs PWM relativement nouveaux ont subi un certain nombre d'améliorations. Et si de nombreux radioamateurs ont déjà rencontré le prototype sur les pages de "Radio" dans [2], alors les descriptions des SMPS avec contrôleurs PWM de la série UC384X n'ont pas encore été publiées, à l'exception de [3], où le spécifié le microcircuit est utilisé d'une manière quelque peu non conventionnelle - comme régulateur pour un régulateur de tension de commutation abaisseur. Examinons brièvement les principales propriétés et différences du microcircuit KR1033EU10 (UC3842, KA3842), que nous continuerons à appeler EU10, du KR1033EU5 (TDA4605), appelé EU5. Les deux microcircuits sont fabriqués dans un boîtier en plastique 2101.8-1 (selon la terminologie étrangère - DIP-8). Le but des broches EU10 est indiqué dans le tableau.
principales caractéristiques
Le contrôleur EU10 PWM, comme le EU5, est conçu pour connecter un transistor à effet de champ à grille isolée à canal N et a fondamentalement la même fonctionnalité. Notons la première caractéristique de EU10. La fréquence de conversion dans le SMPS sur EU5 est réglée automatiquement en fonction de la tension du secteur, des paramètres du microcircuit et du transistor de commutation, de l'inductance de l'enroulement primaire du transformateur d'impulsions, de la consommation électrique de la charge, etc. Ainsi, lorsqu'elle est exposée à des facteurs déstabilisants, la fréquence de conversion s'avère "flottante" : pour tout SMPS réalisé sur EU5, en fonction uniquement de la puissance de la charge, elle peut prendre une valeur de 18 kHz au maximum et jusqu'à 70 kHz. à charge minimale. Cette fonctionnalité complique quelque peu la conception d'un transformateur d'un tel SMPS, c'est pourquoi, généralement, un calcul approximatif et un prototypage sont d'abord effectués, puis, sur la base des résultats des tests avec une charge réelle, les ajustements nécessaires sont effectués. Dans le microcircuit EU10, la fréquence de conversion de fonctionnement est réglée par un circuit RC de réglage de fréquence externe connecté à la broche 4. Étant donné que la résistance du circuit RC est connectée à une source interne de tension de référence de précision de 5 V - broche 8, indépendamment de diverses déstabilisations facteurs, la fréquence de conversion de fonctionnement est rigidement fixée. Sur la fig. 1, a montre la forme exponentielle de la tension Uc sur le condensateur de réglage de fréquence, correspondant aux impulsions de commutation à la sortie du contrôleur PWM (broche 6 Uout), représentée sur la fig. 1, b.
Pour caractériser le mode de fonctionnement du contrôleur PWM, il est pratique d'utiliser le rapport cyclique des impulsions de commutation D - il s'agit d'un paramètre qui est l'inverse de leur rapport cyclique. La valeur du facteur de remplissage est toujours inférieure à un. Il n’est cependant pas recommandé de le choisir à plus de 0,5 [3]. Un déclencheur de comptage supplémentaire interne a été introduit dans le circuit de sortie du contrôleur PWM KR1033EU11 (UC3844), qui limite le rapport cyclique D≤0,5, mais en même temps, le circuit RC de réglage de fréquence est conçu pour deux fois la fréquence de fonctionnement de le générateur interne (par rapport au taux de répétition des impulsions de commutation). Pour conclure une brève description générale des contrôleurs PWM de la série UC384X, nous notons que l'UC3843 est similaire à l'UC3842 et que l'UC3845 est similaire à l'UC3844, mais ils sont conçus pour une tension d'alimentation inférieure. Pour eux, le niveau seuil de tension d'alimentation lors du passage à l'état "On" est pour des échantillons individuels de 7,8...9 V (valeur moyenne 8,4 V), "Off" - 7...8,2 V (valeur moyenne - 7,6 V ). Expliquons le concept de stabilité du bruit d'un contrôleur PWM (Fig. 1). Pendant le toff, le condensateur de réglage de fréquence se charge d'environ 1,5 V, le seuil bas du comparateur interne, à un seuil haut d'environ 2,75 V. À ce stade, la sortie du contrôleur PWM est faible. Lorsque la tension sur le condensateur Uc atteint le seuil supérieur, le circuit de décharge interne est activé et le condensateur est déchargé à environ 0,75 V. La tension à la sortie du contrôleur PWM passe à ce moment dans un état unique. Puis pendant le temps tON. jusqu'à ce que la tension aux bornes du condensateur atteigne le niveau de seuil inférieur, le transistor de commutation est passant. On peut voir sur la figure qu'un signal parasite Up avec une tension de 0,1 ... 0,5 V à la fin du cycle de charge peut provoquer un fonctionnement prématuré du circuit de décharge et un faux démarrage du générateur interne, représenté par des lignes pointillées. Cette propriété est le principal inconvénient de cette classe de contrôleurs PWM, mais elle peut être considérablement affaiblie de plusieurs manières. Tout d'abord, des condensateurs céramiques (à faible inductance) d'une capacité d'environ 7 microfarads sont connectés aux broches 8 et 0,1 du microcircuit. Deuxièmement, ils répondent à certaines exigences concernant la topologie du circuit imprimé et la conception du SMPS, qui réduisent l'amplitude des signaux parasites, qui seront expliquées plus tard. Troisièmement, la capacité du condensateur de réglage de fréquence est choisie au moins 1000 pF. Et le moyen le plus fiable d'éliminer complètement cet inconvénient est de synchroniser la fréquence de fonctionnement du contrôleur PWM avec une source externe de tension pulsée, qui est décrite en détail dans [4]. La deuxième différence principale entre l'EU10 est la méthode de surveillance du courant de fonctionnement dans le SMPS. Dans EU5, le changement de courant dans l'enroulement de stockage du transformateur est simulé par un circuit RC externe, et si ces éléments sont mal choisis, le transistor de commutation peut tomber en panne. Un comparateur de contrôle de courant spécial est introduit dans la puce EU10, qui possède deux entrées - inverseuse et non inverseuse. La broche 3 est connectée en interne à l’entrée du comparateur non inverseur. A l'extérieur, un capteur de courant résistif ou transformateur y est connecté dans le circuit source du transistor de commutation. Dès que la tension du signal du capteur de courant dépasse la valeur seuil de 1 V, correspondant à la valeur de courant de crête dans le circuit de drain du transistor, le comparateur éteindra l'amplificateur de sortie du contrôleur PWM. Par exemple, pour un transistor avec une limite de courant de drain de 4 A, la valeur de crête correspondant au niveau de déclenchement de la protection est choisie à 3,7 A. Si le SMPS est surchargé, ce déclenchement se produira à chaque impulsion, évitant ainsi d'endommager le circuit de commutation. transistor. Vous pouvez ajuster le niveau de fonctionnement de la protection de courant en modifiant la résistance de la résistance dans le circuit de drain du transistor ou en modifiant le coefficient de transfert du capteur du transformateur de courant. Et la dernière et troisième caractéristique de l'EU10, découlant de la seconde, est la manière de réguler la tension à la sortie du SMPS. Notez que le principe de régulation reste le même : contrôle de la largeur d'impulsion. Si EU5 contrôle la fin du transfert de la partie suivante de l'énergie par la transition de la tension dans les enroulements secondaires jusqu'à zéro et distribue ensuite une telle nouvelle partie pour maintenir la tension à la sortie de l'enroulement de communication auxiliaire inchangée, et donc à la charge, alors EU10 fonctionne un peu différemment. Pour réguler la tension de sortie du SMPS, ainsi que pour neutraliser l'influence négative des facteurs déstabilisants, on utilise l'entrée de l'amplificateur de signal d'erreur - sortie 2, à laquelle est connecté un enroulement auxiliaire supplémentaire du transformateur, formant ainsi un boucle de rétroaction externe, appelée boucle de contrôle primaire. L'amplificateur surveille l'effet perturbateur des facteurs déstabilisants et corrige les paramètres des impulsions de commutation afin que la tension à la sortie de l'enroulement de communication et à la charge reste constante. Les propriétés de fréquence et de phase de la caractéristique de transfert de l'amplificateur de signal d'erreur, qui déterminent sa stabilité, sont régulées par un circuit RC externe connecté à la broche 1, qui est connectée en interne à la sortie de cet amplificateur. Grâce à cette architecture du microcircuit, les développeurs ont prévu la possibilité d'utiliser la broche 1 pour l'arrêt à distance ou d'urgence du SMPS (transfert en STANDBY MODE - mode veille), en le fermant à un fil commun à l'aide d'un transistor externe. Si un capteur optoélectronique est connecté à cette sortie et est connecté électriquement à la sortie, une deuxième boucle de contrôle de tension de sortie est obtenue, ce qui améliore les propriétés stabilisantes du SMPS et permet en outre de mettre en œuvre un démarrage « doux » de le SMPS. La stabilisation de la tension de sortie du SMPS se produit comme suit. La sortie de l'amplificateur de signal d'erreur à l'intérieur du microcircuit est connectée via des circuits d'adaptation à l'entrée inverseuse du comparateur de contrôle de courant. Un capteur de courant est connecté à l'entrée non inverseuse du comparateur. Dans le comparateur de courant, dès le début de chaque impulsion de commutation, ces deux signaux sont comparés. Si les signaux correspondent, chaque impulsion de commutation s'arrêtera au moment où le courant dans l'enroulement de stockage atteint la valeur de crête requise. En mode normal, cela se produira beaucoup plus tôt que le courant de crête n'atteindra la valeur limite du courant de drain du transistor de commutation. À son tour, le courant de crête détermine la puissance de fonctionnement du transformateur. L'énergie stockée dans l'enroulement de stockage d'un transformateur avec inductance L est déterminée par l'équation W = LIP2/2, et si l'accumulation d'énergie est arrêtée à ce moment, lorsque le courant croissant linéairement dans l'enroulement atteint la valeur de crête requise IP , les circuits de puissance secondaires recevront la part d'énergie nécessaire. De plus, si à tension constante du secteur U0 on compare deux versions du convertisseur, qui diffèrent, par exemple, d'un facteur deux dans la fréquence de conversion, l'inductance de l'enroulement de stockage devrait également différer d'un facteur de deux. Ceci est nécessaire pour modifier la vitesse de montée du courant en dents de scie, déterminée par le rapport U0 /L. Ainsi, par exemple, si le courant dans l'enroulement à une fréquence de conversion de 100 kHz au moment de l'impulsion de commutation atteint une valeur maximale après 2 µs, alors à une fréquence de 50 kHz, en raison d'un doublement de l'inductance à la même tension U0, après 4 µs. La puissance pour les deux options reste la même, puisque dans l'expression la caractérisant P=W/T (T=1/f est la période de la fréquence de conversion), le numérateur et le dénominateur changeront proportionnellement. Mais les dimensions du circuit magnétique du transformateur pour ces options différeront considérablement : plus la fréquence est élevée, plus le circuit magnétique requis pour la même puissance est petit. De même, avec une inductance L constante et une tension U0 changeante, l'intervalle de temps tON variera. pendant laquelle l'énergie s'accumule dans l'enroulement primaire du transformateur, puisqu'elle est inversement proportionnelle au rapport U0/L. Ainsi, l’énergie stockée dans chaque impulsion reste constante et indépendante des facteurs déstabilisants. Les radioamateurs qui souhaitent étudier plus en détail le schéma fonctionnel, la description fonctionnelle et les caractéristiques du dispositif à puce EU10 peuvent se référer à l'ouvrage de référence [4]. ALIMENTATION SUR PUCE KR1033EU10 Schéma de la version la plus simple proposée du SMPS. dont la base est le contrôleur PWM KR1033EU10 (UC3842, KA3842), illustré à la fig. 2.
Principaux paramètres de SMPS
La source de tension secteur, ainsi que le filtre secteur basse fréquence et haute fréquence, sont réalisés de manière similaire au prototype [2] et n'ont pas de particularités, sauf que l'élément qui limite le courant d'appel lorsque le SMPS est allumé est une thermistance RK1 avec un TCS négatif. A l'allumage, sa résistance est maximale, puis au fur et à mesure qu'elle chauffe sous l'influence du courant consommé par l'appareil, elle diminue. Cela permet de protéger le pont de diodes réseau VD1 contre les dommages en mode démarrage. Certes, avec un redémarrage rapide, l'efficacité d'une telle protection est faible. Le diviseur de tension R1 - R3 dans le circuit amplificateur de signal d'erreur permet d'ajuster et de stabiliser la tension de sortie du SMPS à l'aide de la boucle de contrôle primaire. La résistance R6 alimente le microcircuit en mode démarrage, lorsque le courant consommé par celui-ci ne dépasse pas 1 mA. Après la mise sous tension du SMPS, la tension secteur redressée via la résistance de limitation R6 est fournie au condensateur de filtrage C11 dans le circuit d'alimentation du microcircuit. Lorsque la tension sur le condensateur atteint le niveau seuil pour la transition du microcircuit vers l'état "on" (valeur typique - 16 V), le comparateur est déclenché et l'alimentation est fournie à tous les éléments du contrôleur PWM, après quoi le interne la source de tension de référence est allumée, puis le générateur d'impulsions de commutation et l'amplificateur de sortie. Le SMPS passe du mode de démarrage au mode de fonctionnement, alimentant le microcircuit à partir de l'enroulement auxiliaire de la connexion du transformateur via la diode VD5. Le courant consommé par le microcircuit augmente jusqu'à 11 ... 17 mA. Si la tension secteur chute, la tension de sortie du SMPS et la tension d'alimentation du microcircuit diminueront progressivement. Le taux de diminution de la tension de sortie est des centaines de fois inférieur à la tension d'entrée en raison de la stabilisation, cependant, il viendra un moment où la tension d'alimentation du microcircuit atteindra le niveau seuil pour passer à l'état "off" (la valeur typique est de 10 V). À ce moment, le comparateur fonctionnera et l'alimentation de tous les éléments du contrôleur sera coupée. La différence (6 V) entre les niveaux seuils d'allumage et d'extinction du microcircuit (hystérésis de la tension d'alimentation) est nécessaire pour éviter une commutation aléatoire des circuits de puissance en mode démarrage. Le taux de répétition des impulsions de commutation (la fréquence de fonctionnement de conversion en SMPS) est déterminé par les paramètres du circuit R5C8. Pour que la fréquence de conversion corresponde à la valeur calculée f = 30 kHz, il peut être nécessaire de sélectionner les valeurs des éléments de réglage de fréquence. Comment déterminer les valeurs requises des éléments de réglage de fréquence pour une fréquence de fonctionnement différente sera discuté plus tard. Une attention particulière dans la conception de la variante décrite du SMPS est accordée à assurer sa stabilité au bruit. Dans une large mesure, la stabilité globale de l'amplificateur de signal d'erreur du contrôleur, et donc du SMPS, est déterminée par les paramètres du circuit de compensation R4C5. Les éléments suivants ont le même objectif : la diode VD2, qui élimine les surtensions négatives par rapport au fil d'alimentation commun du microcircuit de tension lors de la chute des impulsions de commutation ; Diode Zener VD3. limiter les surtensions « brusques » de tension positive aux fronts des impulsions de commutation ; inductance L2 et résistance de limitation de courant R7, qui empêchent l'auto-excitation du transistor de commutation à haute fréquence. Les condensateurs céramiques C9 et C10, connectés directement aux broches 7 et 8 du microcircuit, augmentent considérablement la stabilité de l'amplificateur. Sur le capteur de courant - résistance R11 - des impulsions de tension en dents de scie sont formées pour les circuits de commande et de protection, dont la valeur crête dépend du courant de drain du transistor de commutation. L'amplitude du signal devient égale à 1 V avec un courant de drain de 3,7 A. Cela garantit une protection fiable du transistor contre les dommages. Le condensateur à oxyde C13, connecté en parallèle avec la résistance, atténue considérablement le bruit de commutation, empêchant ainsi un faux fonctionnement du comparateur de contrôle de courant. Le condensateur C7 a le même objectif. Le condensateur C6 corrige la pente de la tension en dents de scie au niveau des broches 3 et 4 du microcircuit, atténuant considérablement le bruit haute fréquence, ce qui assure également la stabilité requise du contrôleur. Aucune mesure moins efficace n'est nécessaire pour réduire l'amplitude des interférences générées dans le SMPS. Un rôle très important à cet égard est attribué à l'écran électrostatique installé sur le transformateur d'impulsions. De fortes interférences sont également émises par un dissipateur thermique sur lequel un transistor de commutation est installé, si le dissipateur thermique n'est pas connecté à un fil commun et que le transistor n'en est pas isolé avec une plaque de mica. Des interférences importantes génèrent des courants pulsés circulant dans les conducteurs connectés au drain du transistor de commutation et à l'enroulement de sortie. Afin de les affaiblir dans le SMPS décrit, le transistor est connecté au transformateur avec un court morceau de câble coaxial, et le conducteur imprimé reliant la diode de redressement et l'enroulement de sortie est choisi pour avoir une longueur minimale et une grande section. Il est bien évident que les processus de commutation qui se produisent au moment de l'activation et de la désactivation du transistor contribuent considérablement à la création d'interférences. La présence de la capacité drain-source interélectrodes dans le transistor à effet de champ, ainsi que de la capacité distribuée et de l'inductance de fuite dans les enroulements du transformateur conduit, au moment de la mise hors tension du transistor, à l'apparition d'un signal « aigu ». surtension importante sur son drain, puis un signal haute fréquence amorti de manière exponentielle. La fréquence de remplissage de ce signal, si aucune mesure particulière n'est prise, est déterminée par l'inductance de fuite du transformateur et la capacité interélectrodes du transistor. Le circuit amortisseur VD4R10C12, connecté en parallèle avec l'enroulement de stockage du transformateur, supprime les oscillations libres de ce signal et « lie » la surtension à l'alimentation secteur. Habituellement, dans les convertisseurs flyback, un condensateur supplémentaire avec ou sans résistance et diode connectées en série-parallèle est connecté par rapport au fil commun (source) au drain du transistor de commutation. Ces éléments suppriment non seulement efficacement les processus de commutation, mais contribuent également à réduire le taux d'augmentation de la tension au niveau du drain du transistor au moment où il est désactivé, empêchant ainsi une dissipation dangereuse de la puissance instantanée sur le transistor et transférant la combinaison de fonctionnement maximum courant et tension de fonctionnement maximale dans la région des modes de fonctionnement sûrs. Dans le SMPS décrit, cette fonction est réalisée avec succès par l'inducteur L3. La tension de sortie redressée est fournie à la charge via un filtre en forme de U, grâce auquel l'ondulation de la tension de sortie est réduite au niveau requis. Le condensateur C17 connecte les circuits de sortie et d'entrée du SMPS à haute fréquence, atténuant efficacement les interférences générées et améliorant considérablement la compatibilité électromagnétique du SMPS avec les appareils connectés aux circuits de puissance. Un dessin du circuit imprimé SMPS est présenté sur la Fig. 3. Il est constitué d'une feuille de fibre de verre sur une face de 1,5 mm d'épaisseur et reprend essentiellement la conception du prototype [2]. L'exception concerne les grandes zones laissées sur la carte avec une métallisation continue, qui contribuent à augmenter l'immunité au bruit de l'appareil.
Des pièces et éléments non déficients sont utilisés dans l'appareil. Condensateur C1 - K73-17 pour une tension nominale de 630 V, C2, C3 - K15-5, C12 et C17 - K78-2 ou K15-5 pour une tension nominale d'au moins 1000 V. Condensateur à oxyde C4 - K50-32 . Il est permis de le remplacer par le K50-35B national ou un analogue importé. Pour les condensateurs C9 et STO - KM-5 - les conclusions sont raccourcies au minimum optimal et soudées directement aux conclusions 5,7 et 8 du microcircuit du côté des conducteurs imprimés. Condensateur à oxyde C13 - K53-14 ou autre tantale, condensateur C11 - K50-35. Les condensateurs à oxyde C14 - C16 sont importés. Vous pouvez en utiliser des domestiques, mais leurs tailles sont légèrement plus grandes. Tous les autres condensateurs - toute céramique pour une tension nominale d'au moins 50 V. La thermistance SCK105 importée, où les trois premiers caractères alphabétiques indiquent la série, les quatrième et cinquième caractères numériques indiquent la résistance nominale en ohms à une température de 25 ° C et le dernier chiffre indique le courant de fonctionnement maximum en ampères, c'est autorisé pour remplacer domestique par des paramètres similaires. Toutes les résistances sont OMLT, à l'exception de la résistance importée R11, dont la taille correspond approximativement à l'OMLT-1 domestique. Résistance ajustable R2 - SPZ-38b. Nous remplacerons le pont redresseur KTs405A (VD1) par des diodes séparées avec une tension inverse admissible d'au moins 400 V et un courant d'au moins 1 A. Diode D310 (VD2) avec un courant direct admissible de 0,5 A et une tension inverse de 20 V peut être remplacé par une diode moderne avec une barrière Schottky, dans laquelle la chute de tension continue au courant maximum ne dépasse pas 0,5 V. La diode Zener (VD3) peut être remplacée par toute autre diode de faible puissance avec une tension de stabilisation de 16 ... 18 V. La diode impulsionnelle en place VD4 (KD257D) doit être conçue pour une fréquence de fonctionnement d'au moins 50 kHz , la tension inverse maximale est de 1000 V et le courant maximum est de 3 A. Nous remplacerons le KD220B ( VD5) avec une diode KD220A ou une autre avec des paramètres similaires. La diode de redressement KD213B (VD6) avec une fréquence de fonctionnement allant jusqu'à 100 kHz peut supporter une tension inverse de 200 V et un courant maximum de 10 A. La connexion en parallèle de telles diodes, conçues pour un courant inférieur, sans résistances de nivellement de courant est permis. Il est également possible d'utiliser des diodes modernes. Nous remplacerons le transistor KP707V2 par des analogues importés avec une tension drain-source maximale d'au moins 700 V et un courant de drain admissible d'au moins 4 A. Il est installé sur un dissipateur thermique avec une zone de refroidissement efficace de 100. .200 cm2 à travers une plaque de mica enduite sur les deux faces de pâte thermoconductrice KPT-8. La borne de drain du transistor du côté des conducteurs imprimés de la carte est reliée au transformateur avec un court morceau de câble coaxial d'un diamètre extérieur d'environ 5 mm, après avoir enfilé au préalable le noyau central à travers un tube de ferrite. En figue. La figure 3 montre classiquement les points de départ et d'arrivée pour connecter l'inducteur L3, mais l'image du segment de câble n'est pas représentée. Pour éliminer les parasites supplémentaires, la tresse du câble doit être reliée au fil commun à des endroits strictement définis : d'une part, à proximité immédiate du point de raccordement de la diode VD4 et de la borne 3 du transformateur, d'autre part, à point commun de potentiel zéro R11C13. Le tube de ferrite est collé à travers un joint isolant sur la carte du côté des conducteurs imprimés sous les éléments R11, C13. Il est permis de remplacer la self industrielle du filtre ligne L1 par une self artisanale. Il est enroulé en deux conducteurs MGTF 0,35 sur un magnétophone radio à anneau de ferrite 1500NM-2000NM avec un diamètre extérieur d'environ 20 mm jusqu'à ce qu'il soit rempli. Les inductances L2 et L3 sont des morceaux de tubes de 5 ... 7 et 10 ... 12 mm de long respectivement, en ferrite haute fréquence utilisée dans les selfs DM-1,0, etc. Pour obtenir les valeurs d'inductance indiquées dans le schéma , pour le starter L2, un tour de fil PEVT 0,41, et pour L3 - deux tours. Dans la version de l'auteur, des produits importés similaires ont été utilisés, alors qu'il fallait un tour (passage) pour chaque papillon. La self L4 est enroulée sur un segment de tige d'un diamètre de 10 et d'une longueur de 35 ... 40 mm en ferrite 400NN. Son enroulement contient 30 tours de fil PEV-2 1,5. Le circuit magnétique du transformateur T1 est assemblé à partir de deux moitiés de ferrite Sh12x20x21 M3000NMS2, utilisée dans les alimentations de téléviseurs pour téléviseurs 3 (4) USCT, etc., avec un entrefer non magnétique sur la tige centrale de 2,4 mm. Les bobinages sont enroulés sur un châssis standard avec des cordons de contact dont la numérotation correspond à celle indiquée sur le schéma. Ils sont exécutés comme suit. Tout d'abord, la première section de l'enroulement primaire est enroulée - 26 tours de PEVT 0,41 en deux fils. Il est isolé avec deux couches de tissu verni de 0,05 mm d'épaisseur. Un enroulement de sortie de 25 tours de fil PEV-2 1,5 est enroulé sur l'isolant. Dans ce cas, les conclusions 10, 12 et 14 présentes sur le cadre sont retirées et le fil de bobinage est utilisé comme conclusions, en le passant par la fente entre les conclusions 10 et 12, 12 et 14, respectivement. Dans le schéma, les numéros de broches sont classiquement désignés par 10a et 12a. Ensuite, deux couches d'isolation sont posées et une deuxième section de l'enroulement primaire est enroulée dessus, contenant 44 tours. Le dernier enroulement est un enroulement de communication auxiliaire de 12 tours de fil PEVT d'un diamètre de 0,15 ... 0,21 mm, le répartissant uniformément sur toute la largeur du cadre et le recouvrant d'une autre couche d'isolation par le haut. Après avoir collé les plaques de ferrite du transformateur, les enroulements ainsi que le circuit magnétique sont recouverts d'un écran électrostatique constitué d'une seule couche de feuille de cuivre. Le nombre de tours dans les enroulements est déterminé par le circuit magnétique et l'entrefer non magnétique. Par conséquent, pour un autre circuit magnétique, ils doivent être recalculés. Le SMPS est connecté au réseau avec un câble bifilaire dont la rupture comprend un interrupteur PKn41 ou un interrupteur à bascule TV2-1, ainsi qu'un fusible 2 A. Si lors de la fabrication du transformateur, le déphasage des enroulements n'est pas perturbé et que des pièces réparables sont utilisées, la configuration de l'appareil est réduite au réglage de la tension de sortie avec la résistance d'ajustement R2. L'utilisation d'éléments du circuit de réglage de fréquence R5C8 sans leur sélection préalable peut entraîner un léger écart de la fréquence de fonctionnement par rapport à la valeur calculée. Le type et les valeurs nominales de la plupart des éléments utilisés dans le SMPS ont été déterminés conformément aux résultats de la conception assistée par ordinateur, qui seront discutés plus tard. CARACTÉRISTIQUES DE CONCEPTION DES SMPS INVERSES Il est possible que l'IIP décrit satisfasse pleinement l'un des radioamateurs, et il décidera de le répéter sans rien changer. Mais la probabilité qu'un tel événement se produise est très, très faible : selon l'étendue des intérêts des radioamateurs, et ils sont toujours multiformes, vous aurez peut-être besoin d'une source dont les paramètres différeront considérablement de ceux donnés. Par conséquent, dans la plupart des cas pratiques, il sera nécessaire de modifier le dispositif décrit et d'y apporter certaines modifications. Le groupe de sociétés STMicroelectronics, producteur de composants radioélectroniques, a développé et commercialise sur le marché mondial, y compris le marché russe, une gamme de microcircuits sous la marque VIPer. Sans entrer dans les détails de l'abréviation utilisée, notons seulement que ce produit est une version intégrale du fragment principal du SMPS, comprenant un transistor de commutation et un contrôleur PWM. Tels que conçus par les développeurs, de tels microcircuits devraient grandement faciliter le travail des concepteurs et des opérateurs du SMPS. Une certaine augmentation (2...4 fois - selon la puce sélectionnée) du coût de la base d'éléments du SMPS à commutation VIPer, par rapport à sa version discrète, est entièrement compensée par les capacités de conception automatisée, ainsi que récupération rapide par simple remplacement de la puce en cas de dysfonctionnement. . Pour la conception automatisée de SMPS basés sur des microcircuits VIPer, la même société a développé un progiciel distribué gratuitement VIPer Design Software. La dernière version du programme (v2.12) d'une capacité de 4 Mo peut être téléchargée sur le site du développeur . Ce progiciel, ci-après dénommé DS (Design Software), peut être utilisé avec succès pour concevoir l'option SMPS décrite basée sur le contrôleur PWM UC3842. Une interface conviviale vous permet d'accomplir une tâche aussi complexe en quelques minutes. Avant d'utiliser DS, clarifions certaines caractéristiques de conception liées au choix des éléments et au réglage de la fréquence de conversion de fonctionnement dans le SMPS. Il faut se rappeler que dans les transformateurs flyback pulsés, le circuit magnétique est toujours réalisé avec un entrefer non magnétique sur la tige centrale (noyau). Nous parlons de transformateurs avec des plaques en forme de W, ainsi que de noyaux magnétiques modernes KB (analogue étranger du RM) [5, 6]. Faisons également attention à la préférence pour l'utilisation de ferrite pour les transformateurs d'impulsions, par exemple la marque M3000NMS-2, dont le nom contient le symbole C. C'est un signe de la capacité d'un fil magnétique constitué de ce matériau à fonctionner dans des champs magnétiques forts, dus, contrairement aux autres, à un coefficient de température négatif des pertes spécifiques. Malgré la diminution du rendement et la détérioration de la compatibilité électromagnétique du transformateur avec d'autres éléments, il est impossible de refuser un entrefer non magnétique. Premièrement, dans des champs magnétiques forts, l'entrefer empêche la saturation du circuit magnétique, et d'autre part, avec le bon choix du mode de fonctionnement du transistor de commutation, la présence d'un entrefer empêche une augmentation excessive de la valeur d'amplitude des impulsions de courant dans son circuit de vidange. Par conséquent, nous devons supporter des pertes et prendre en compte le fait que l'intensité du rayonnement sonore associé aux harmoniques fondamentales et supérieures de la fréquence de fonctionnement de la conversion augmente relativement rapidement après 100 kHz. Bien entendu, il existe des matériaux magnétiques dans lesquels les domaines sont séparés les uns des autres par une substance non magnétique (par exemple, un magnétodiélectrique à base de permalloy de molybdène grades MP-60, MP-140, MP-160, MP-250, etc.), il y a un espace en eux, pour ainsi dire réparti dans tout le volume de travail du noyau magnétique et donc, en principe, il est possible d'utiliser des noyaux magnétiques solides sans espace. La deuxième source de pertes dans le SMPS est la résistance croissante des conducteurs du bobinage due à une diminution de la profondeur de pénétration du champ aux fréquences plus élevées. Par conséquent, pour réduire les pertes causées par ce phénomène, il est souhaitable d'enrouler l'enroulement à partir de plusieurs conducteurs parallèles, dont la section transversale est équivalente à celle d'origine, mais la surface latérale le long du périmètre de la croix du conducteur -la section est plusieurs fois plus grande. Plus précisément, l'augmentation de la surface latérale est dans ce cas proportionnelle à la racine carrée du nombre de conducteurs parallèles. La troisième source de pertes est liée à l'inversion d'aimantation du circuit magnétique. Et enfin, la dernière et quatrième source de pertes est due à la nécessité d'utiliser divers circuits à condensateurs résistifs qui suppriment les processus de commutation transitoires, et à la vitesse limitée des éléments radio utilisés dans le SMPS - des condensateurs à oxyde, un transistor à effet de champ. , diodes de redressement. La tension non sinusoïdale (impulsionnelle) sur ces éléments et la grande amplitude de courant (jusqu'à plusieurs ampères) entraînent un poids spécifique important des pertes dans ceux-ci. Toutes ces pertes doivent être prises en compte lors de la conception de SMPS utilisant DS. Les pertes dans le transformateur entraînant un échauffement de ses enroulements et de son circuit magnétique, l'un des critères est utilisé pour les évaluer : soit l'échauffement admissible du transformateur sans son refroidissement forcé, qui est généralement choisi entre 30... 50°C , ou le poids spécifique des pertes est supposé être de 1 à 5 % de la puissance du transformateur. La performance globale du SMPS est évaluée en fonction de son efficacité. Dans le meilleur des cas, sa valeur peut atteindre 92...95 %, dans le pire des cas - 60...65 %. SÉLECTION DU TRANSISTOR DE COMMUTATION ET DES DIODES DE REDRESSEMENT Le transistor de commutation sans aucun calcul peut être sélectionné avec une marge multiple. Et il est possible de résoudre ce problème de manière plus rationnelle. Comment déterminer les paramètres auxquels doit correspondre le transistor de commutation, en fonction des caractéristiques techniques du SMPS conçu ? Malheureusement, le package DS ne répond pas directement à la question posée. Par conséquent, considérons d’abord la forme de la tension pulsée au drain du transistor Uc (Fig. 4).
Conformément aux données initiales, à une tension nominale de 220 V à la sortie du redresseur secteur, sans tenir compte de la chute de tension aux bornes des diodes du redresseur et de la thermistance, on obtient [7] U0 = 220√2 \u310d 80 V. De plus, au drain du transistor, il y a un supplément à la tension secteur redressée Uadm. Dans la littérature étrangère et en DS, on l'appelle UR (réfléchi - réfléchi, induit). Comme le montrent les résultats de l'essai de plusieurs variantes de transformateurs d'impulsions, sa valeur s'avère toujours très proche de la valeur par défaut proposée dans DS de XNUMX V. Montrons comment déterminer la valeur réelle de la tension supplémentaire. La tension aux bornes de l'inductance est directement proportionnelle au taux de variation du courant : U = LΔI/Δt ou U Δt = L ΔI. Puisque les changements de courant avec le transistor passant et bloqué pour le processus stable sont les mêmes, les zones des rectangles marqués S+ et S- sur la Fig. 4. En calculant leurs aires, on obtient l'équation Uo·D·T = Uadd(1-D)T ou après transformations Uadd = Uo·D /(1-D). D'autre part, conformément à l'interprétation géométrique du processus de transfert d'énergie, la tension de sortie sur l'enroulement secondaire est la tension supplémentaire transformée sur l'enroulement primaire : Uadd = k Uout, où k = wl / wout - la transformation rapport (wl, wout - le nombre de tours des enroulements primaire et de sortie, respectivement). À proprement parler, l'hypothèse selon laquelle chaque partie de l'énergie prélevée sur le réseau lors du premier cycle est transférée sans laisser de trace à la charge lors du deuxième cycle, comme le montre la Fig. 4 comme une ligne continue, et en même temps la transmission se termine exactement au moment où le transistor est rendu passant, est dans une certaine mesure conditionnelle. En réalité, les SMPS peuvent fonctionner selon deux modes : le mode flux magnétique continu et le mode flux discontinu. En pratique, cela signifie que si au moment où le transistor de commutation est rendu passant, le courant dans les enroulements est nul, alors ce mode correspond au mode de débit intermittent. Sinon, le mode flux continu a lieu. Sur la fig. 5 montre des diagrammes de tension et de courant dans les éléments du SMPS : Uc - tension au drain du transistor ; lc - courant de drain du transistor de commutation ; lw out - courant dans l'enroulement secondaire ; UH - tension de charge.
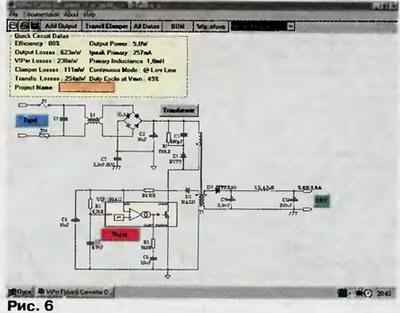
Le mode courant continu correspond à la fig. 5, une. Sa principale caractéristique est que le transistor devient passant à un certain courant de drain. L'avantage de ce mode est le plus petit courant de crête dans les éléments SMPS par rapport aux autres modes et la plus petite ondulation de tension de sortie. Si, en réduisant la tension secteur au minimum, une augmentation du rapport cyclique d'impulsion de plus de 50 % est possible, DS avertit l'utilisateur de procéder à des ajustements dans les calculs. Cela est dû aux particularités de la magnétisation du circuit magnétique en mode pulsé monocycle et à la possibilité d'augmenter l'amplitude du courant de drain du transistor au-delà de la limite admissible. Le mode courant intermittent est illustré à la fig. 5, ch. Une fois le processus de transfert d’énergie terminé, la diode se ferme. Dans les enroulements, des oscillations libres amorties apparaissent lors de la chute de la tension de choc. Ce mode est caractérisé par l'amplitude de courant la plus élevée dans les éléments SMPS et l'ondulation maximale de la tension de sortie. Le mode optimal est le mode transitionnel entre les deux nommés, illustré à la Fig. 5B. Le programme DS vous permet de contrôler l'amplitude, la forme du courant et la tension sur le transistor, ainsi que de déterminer le mode de fonctionnement du SMPS conçu et la valeur du rapport cyclique d'impulsion à n'importe quelle tension secteur possible. Un ajout significatif à la tension agissant sur le drain du transistor est apporté par l'inductance de fuite (en DS, elle est désignée par Inductance de fuite). Ceci est directement lié aux champs parasites dans le transformateur. Pendant l'action des impulsions de commutation, lorsque le transistor est ouvert, l'énergie s'accumule non seulement dans l'enroulement de stockage, mais également dans l'inductance de fuite. Lorsque le transistor est bloqué, cette énergie entraîne une surtension supplémentaire sur son drain, illustrée à la Fig. 4 lignes pointillées. Pour le limiter, des chaînes amortisseurs sont utilisées. Dans le programme DS, vous pouvez choisir soit un circuit à condensateur résistif (RC Clamp), soit une diode Zener de limitation (Transil Clamp). Le calcul de l'inductance de fuite et de la surtension associée est une tâche très difficile, car il faut prendre en compte l'inductance et la capacité dynamique interspires des enroulements, l'entrefer amagnétique du circuit magnétique du transformateur, le sectionnement des enroulements, les paramètres de conception de leur exécution et de nombreux autres facteurs. Le programme DS utilise une valeur moyenne d'inductance de fuite, qui, si nécessaire, peut être modifiée de force par l'utilisateur. Le niveau de limitation des surtensions dans chaque cas spécifique de conception SMPS peut être contrôlé dans la fenêtre Forme d'onde (oscillogramme) et pris en compte lors du choix d'un transistor en fonction de la tension drain-source maximale autorisée. Choisir une diode de redressement en DS n'est pas difficile. La fenêtre OUT fournit les informations nécessaires sur ses paramètres : courant direct et inverse, chute directe et tension inverse maximale autorisée. CONCEPTION AUTOMATISÉE DE SMPS INVERSE Alors, allumez l'ordinateur et exécutez le programme DS. Un écran de démarrage apparaît sur l'écran du moniteur pendant quelques secondes, puis une fenêtre s'ouvre (Fig. 6). Par défaut, le programme charge le projet "préparation" sous le nom "Default.vpa".
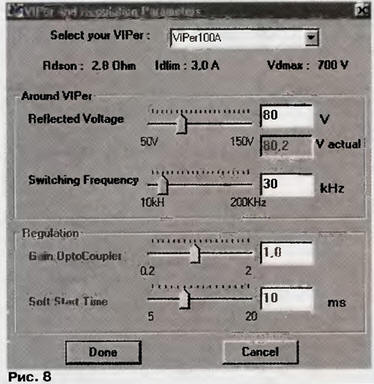
Déplacez le curseur de la souris sur le bouton bleu à l'écran Entrée (entrée) et un message contextuel apparaît sur l'écran du moniteur : Édition des paramètres de la ligne AC (édition des paramètres de la ligne AC). Nous appuyons sur le bouton. La fenêtre Paramètres d'entrée apparaît sur l'écran du moniteur, illustré à la fig. 7.
Dans la section Fréquence de ligne, réglez 50 Hz, dans la section Plage d'entrée CA (intervalle de tension CA d'entrée) à l'aide du curseur, ou après avoir placé le curseur dans la fenêtre appropriée - en tapant sur le clavier, - réglez Tension minimale (tension minimale) et Tension maximale (tension maximale), la première - avec une précision de 5 V, la seconde -10 V. Vous pouvez régler n'importe quelle tension à partir du clavier avec une précision de 1 V. Pour la plupart des appareils, le changement autorisé du secteur la tension est considérée comme étant de -10 ... + 5% de la valeur nominale ou après arrondi dans le sens d'une augmentation de l'intervalle - 195 ... 240 V. Vous pouvez définir l'intervalle et un peu plus large, mais dans tous les cas, vous ne doit pas le laisser défini par défaut, car plus il est grand, plus les exigences sont strictes concernant la base d'éléments utilisée. Ensuite, dans la même fenêtre, accédez à la section Input Ripple (amplitude de l'ondulation de la tension d'entrée) et définissez sa valeur requise. La capacité du condensateur de filtrage du redresseur secteur et l'amplitude de l'ondulation de la tension de sortie dépendront de ce paramètre, qui à son tour dépendra également du courant de charge et de la capacité du condensateur de filtrage de sortie. La valeur d'ondulation acceptable est de 10 ... 30 V. Réglez 30 V et appuyez sur le bouton Terminé - terminé (vous pouvez annuler les modifications apportées si nécessaire avec le bouton Annuler). La fenêtre Paramètres d'entrée se fermera automatiquement et le système effectuera quelques ajustements : par exemple, la capacité du condensateur du filtre du redresseur secteur changera. À l'étape de conception suivante, nous procédons au réglage de la fréquence de conversion de fonctionnement et à la présélection du transistor de commutation, pour lequel nous appuyons sur le bouton VIPer. Dans la fenêtre apparue Paramètres VIPer et régulation (VIPer et paramètres de régulation) (Fig. 8) dans la fenêtre Sélectionnez votre VIPer (sélectionnez VIPer), nous appelons la liste déroulante des produits et sélectionnons VIPer 100A. Désormais, juste en dessous de son nom, seront affichés les principaux paramètres : Rdson : 2,8 Ohm (résistance de la section drain-source à l'état passant) ; Idlim : 3,0 A (limite de courant de drain) ; Vdmax : 700 V (tension de drain maximale). Dans la section Autour de VIPer ("autour" de VIPer), la valeur de la tension réfléchie (tension réfléchie) est laissée définie par le système, la fréquence de commutation (fréquence de commutation) est réglée égale à 30 kHz. Cela réduira les pertes et évitera les pièces rares, bien que pour minimiser la taille du transformateur, il soit préférable d'utiliser une fréquence plus élevée - jusqu'à 100 kHz. La section Réglementation reste inactive et n'est pas modifiable. Cela ne peut être fait qu'après l'introduction de la boucle de contrôle secondaire. Cliquez sur le bouton Terminé (terminé). La fenêtre se fermera automatiquement.
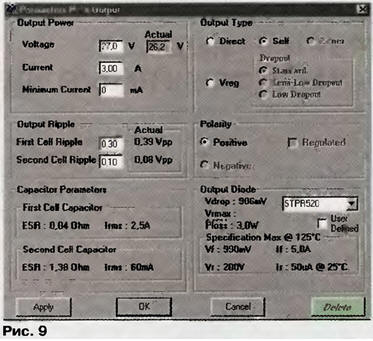
Après cela, allez sur le bouton vert Out (quitter). Dans la fenêtre Paramètres de sortie principale qui s'ouvre (paramètres de la source de tension de sortie principale) (Fig. 9), nous procédons à l'édition de la section Puissance de sortie : dans la fenêtre Tension, définissez 27 V ; dans la fenêtre Courant (courant), nous tapons 3 A ; dans la fenêtre Courant minimum (courant minimum), nous laissons le 0 mA fixé par le programme, ce qui implique la possibilité de travailler en mode veille.
Ensuite, modifiez la section Type de sortie (filtre de sortie). Vous pouvez laisser le filtre LC en forme de U par défaut. Si vous sélectionnez Direct (filtre - condensateur connecté en parallèle à la charge), un très gros condensateur peut être nécessaire. Si Vreg (régulateur de tension) est sélectionné, un régulateur de tension linéaire intégré supplémentaire sera installé à la sortie. Dans ce cas, vous devez spécifier la valeur Dropout (chute de tension aux bornes du stabilisateur). Il existe un choix entre Standard (standard), Low Dropout (faible) et Semi-Low Dropout (moyen). Laissez le filtre de sortie sur Self. Passons à l'édition de la valeur de l'ondulation de tension de sortie - la section Output Ripple : dans la fenêtre First Cell Ripple (ondulation dans le premier étage), définissez 0,3 V, Second Cell Ripple (ondulation dans le deuxième étage) - 0,1 V. Après toutes les manipulations ci-dessus, cliquez sur le bouton Appliquer. Le programme calculera immédiatement les paramètres des éléments du circuit de sortie et présentera les résultats des calculs pour la diode de redressement : Vdrop : 906 mV - chute de tension directe, Vrmax : 150 V - partie de tension inverse maximale des pixels de l'élément spécifié), Ploss : 3 W - pertes sur la diode ; Spécification Max@125 °С - paramètres de la diode STPR520 à la température spécifiée : Vf : 990 mV - chute de tension directe, If : 5 A - courant direct admissible, Vr : 200 V - tension inverse limite ; Ir : 50 uA à 25 °C est le courant inverse maximum à la température spécifiée. Selon l'ouvrage de référence, nous sélectionnons un analogue domestique proche du KD213B. Il est à noter qu'en raison de la forme de la tension pulsée, très différente du méandre, la diode redresseur, participant à la formation d'une tension relativement faible de 27 V, subit une tension inverse nettement plus élevée - environ 150 V - et tenez compte de ce fait lors du choix des diodes. Après avoir terminé cette étape de conception, cliquez sur le bouton OK de la fenêtre de sortie principale des paramètres ouverte, après quoi elle se ferme. Et la dernière étape de conception est liée à l'édition des paramètres du transformateur d'impulsions. Cliquez sur le bouton gris Transformer, après quoi la fenêtre Transformer Design s'ouvrira (conception du transformateur), illustrée à la fig. dix.
La fenêtre contient deux sections principales : Transformer Parameters (paramètres du transformateur) et Transformer Outlook (sortie du transformateur), dont le contenu correspond au transformateur dont la taille standard est indiquée dans la section Core Size (taille du noyau). Le programme utilise la plus petite taille de cœur possible, selon le critère de perte par défaut Augmentation de la température dans la section Critères de sélection du cœur. En face de ce critère, une case à cocher est cochée, dans la même ligne avec laquelle ses valeurs sont indiquées : Cible 40°С (admissible) et Actual 34,8°С (réel). Parallèlement, les valeurs du critère secondaire Dissipated Power (puissance dissipée) correspondent à Target 2%, Actual 2,2%. Cette dernière, comme dépassant la norme établie, est affichée dans la fenêtre sur fond rouge. Si vous sélectionnez le deuxième critère comme principal (cochez la case en face de son nom), puis cliquez sur le bouton Appliquer, les paramètres du transformateur changeront immédiatement Dans la fenêtre Géométrie de la section Core Size, les dimensions de chaque plaque sont affichées dans l'ordre suivant : largeur/hauteur/épaisseur E36/18/11 Série E (géométrie pour la série E - un analogue étranger des plaques en forme de W) . L'analogue domestique W 10x10 a presque les mêmes dimensions. Si vous l'utilisez, vous pouvez passer à la section suivante. Si un tel circuit magnétique n'est pas disponible, mais qu'il existe Ш12x20x21 en ferrite M3000NMS2, utilisé dans les alimentations pour téléviseurs 3 (4) USCT et autres, il est nécessaire de recalculer les paramètres du transformateur. Pour ce faire, dans la section Core Size, cochez la case dans la fenêtre Fixe et cliquez sur le bouton Modifier, après quoi la fenêtre Core Size apparaîtra (Fig. 11).
On laisse inchangée la forme du circuit magnétique série E (si nécessaire, dans la même fenêtre, vous pouvez sélectionner un autre circuit magnétique dans la liste proposée, par exemple la série RM10). Ensuite, dans la fenêtre Géométrie, nous sélectionnons une taille standard proche du E42/21/20 existant. Cliquez sur le bouton OK, après quoi la fenêtre Core Size se fermera. Maintenant, dans la section Core Size, vous pouvez lire les paramètres du circuit magnétique sélectionné : Ae 236 mm2 (surface de section transversale) ; Le 98 mm (longueur moyenne de la ligne magnétique) ; Lm 85 mm (longueur moyenne de la bobine) ; W 200 mm2 (section transversale de la fenêtre) ; Ve 23100 mm3 (volume du noyau magnétique). Attention : après avoir augmenté la taille, la bannière rouge correspondant au critère non principal Puissance dissipée a disparu - auparavant sa valeur réelle de 2,2 % dépassait celle requise, mais elle est maintenant revenue à la normale et s'élève à 1,4 %. Passons au contenu de la section Core Material. Par défaut, le programme propose : Type N27, Fournisseur SIEMENS (grade ferrite N27 de SIEMENS). En comparant ses paramètres avec les caractéristiques des ferrites domestiques M3000NMS2 données dans le manuel [8], on note leur bon accord. Si vous devez utiliser une autre ferrite, vous devez cocher la case dans la fenêtre Défini par l'utilisateur (définie par l'utilisateur) et cliquer sur le bouton Modifier, après quoi la fenêtre Matériau du noyau du transformateur apparaîtra (matériau du noyau magnétique du transformateur), illustrée dans Figue. 12.
Il a la possibilité de sélectionner le fabricant et la marque de ferrite dont les paramètres sont affichés dans la même fenêtre. Il est important de noter que quelle que soit la ferrite choisie, la valeur du paramètre Inductance primaire (voir Fig. 10) reste inchangée. Reportez-vous à la section Transformer Outlook (paramètres de sortie du transformateur) pour plus d'informations sur les enroulements du transformateur. Ils peuvent désormais être réécrits (ou imprimés sur une imprimante, une telle opportunité existe) et procéder à une mise en œuvre pratique. Certaines erreurs de calcul, comme tout autre facteur déstabilisant, seront nivelées par les unités de contrôle automatique du contrôleur PWM, mais cela réduira la marge de stabilité du SMPS pour d'autres influences perturbatrices. Par conséquent, il est toujours préférable de ne pas se précipiter et de corriger les résultats de la conception assistée par ordinateur, en les rapprochant le plus possible des résultats réels. CORRECTION DES RÉSULTATS DE CONCEPTION Revenons à la fenêtre Transformer Design, illustrée à la fig. Dix. Dans la section Fil Sélection Conducteurs Parallèles (sélection de conducteurs parallèles dans le bobinage), laissez la case par défaut définie par le programme sur l'élément Fil Unique (conducteur unique), qui correspondra à l'utilisation de conducteurs uniques dans le bobinage. Si vous sélectionnez l'élément //Fils (conducteurs parallèles) et dans la fenêtre correspondante corrigez les 10 conducteurs installés par le système pour un autre nombre attendu, en fonction de la fréquence de fonctionnement, le programme recalculera les enroulements du transformateur avec de nouvelles valeurs initiales. Il est possible d'utiliser des conducteurs de même diamètre pour tous les enroulements. Pour ce faire, cochez simplement la case Diamètre unique et appuyez sur le bouton Appliquer. Nous nous limiterons à l'utilisation de conducteurs uniques de différents diamètres. Désormais, dans la section Transformer Outlook, vous pouvez lire les informations de référence sur tous les enroulements : Entrée AWG20 75T 1W (primaire - fil n° 20 selon la norme AWG, 75 tours de fil unique), Auxiliaire AWG42 13T 1W (auxiliaire - fil n° 42 , 13 tours), Sortie AWG 13 26T 1W (sortie - fil n°13, 26 tours). Pour connaître le diamètre du fil en millimètres, rendez-vous dans la section AWG Détails et cliquez sur l'un des trois boutons colorés dont la couleur correspond à la couleur des enroulements. Dans la rubrique AWG Détails, le nom correspondant de l'enroulement apparaît, et en dessous - ses paramètres géométriques et électriques. Par exemple, pour enroulement auxiliaire (Aux) Ø64 um Iso 76 um ; Rdc = 6,9R ; Rac = 6,9 R (diamètre - 64 microns = 0,064 mm, avec isolation - 0,076 mm ; résistance DC - 6,9 Ohms ; résistance AC - 6,9 Ohms). Dans la section Utilisation du transformateur (utilisation du transformateur), sont données les principales normes, caractérisant certaines réserves qui doivent être prévues lors de la conception d'un transformateur. Ceux-ci incluent l'utilisation du facteur de fenêtre (facteur de remplissage de la section de fenêtre), qui par défaut ne doit pas dépasser 80 %, et la marge Bsat (marge d'induction maximale dans le circuit magnétique) par rapport à l'induction en mode de saturation Bsat 380 mT - au moins 25 %. La densité de flux de 116 mT est calculée comme étant seulement environ 30 % du maximum possible, c'est-à-dire que la marge est de 70 % et que l'exigence de marge est respectée. Une induction magnétique aussi faible est due à l'entrefer non magnétique indiqué ici, égal à 2,28 mm. Conformément à l'algorithme de conception, le programme a calculé que l'inductance primaire dans ce cas devrait être de 0,73 mH. Mais si nous adoptons une approche critique des résultats de conception, il est nécessaire de prendre en compte au préalable l'erreur dans les calculs. Les ouvrages de référence sur les produits en ferrite indiquent que leurs paramètres électromagnétiques peuvent différer de ± 25 % des valeurs indiquées. Par conséquent, il est préférable de ne pas compter sur le hasard et de ne pas surcharger l'ensemble des facteurs déstabilisants avec des influences perturbatrices supplémentaires, mais de corriger les résultats de conception. Cela s'applique tout d'abord à l'inductance de l'enroulement primaire du transformateur. Car lors du développement d'un SMPS, un radioamateur peut disposer d'un circuit magnétique avec un entrefer non magnétique différent de celui calculé. Cette circonstance indique également la nécessité de prendre en compte l'inductance réelle de l'enroulement primaire. Les formules mathématiques connues ne permettent pas de calculer l'inductance de l'enroulement primaire avec une grande précision, car elles ne prennent pas en compte la forte influence de l'entrefer non magnétique sur la perméabilité magnétique effective du matériau du circuit magnétique. Par conséquent, il est plus simple d'enrouler un enroulement d'essai avec le nombre de tours des sondes sur le circuit magnétique disponible. mesurer son inductance Lprobe, puis calculer le nombre de tours w requis pour une inductance L donnée : w = wprobe√ Échantillons L/L. Evidemment, l'inductance du bobinage dépend très peu du diamètre du conducteur. Il peut arriver que le radioamateur ne dispose pas de la gamme de fils de bobinage requise par le système, mais il existe un ensemble de fils d'un diamètre différent qui peut être utilisé pour fabriquer un transformateur. Par exemple, pour l'enroulement primaire, le programme recommande d'utiliser un fil d'un diamètre de 0,812 mm. De plus, à une fréquence de conversion de 30 kHz, vous ne pourrez pas « forcer » le programme à passer aux conducteurs parallèles. Néanmoins, dans la plupart des transformateurs d'impulsions des alimentations de télévision, les enroulements sont constitués de plusieurs conducteurs parallèles. Réalisons cette opération en dehors du système de conception assistée par ordinateur. A partir de la condition d'égalité des surfaces latérales, assimilant la circonférence des conducteurs simples et parallèles, nous déterminons leur diamètre : d2 = d1 / 2 -0,41 mm. L'inductance de l'enroulement primaire du transformateur, contenant 26 spires de deux conducteurs PEV-2 0,41, enroulés sur un circuit magnétique constitué de plaques de transformateur Ш12x20x21 avec un entrefer amagnétique sur la tige centrale de 2,4 mm, s'est avérée être de 103 µH. Pour obtenir l'inductance requise de 730 µH, l'enroulement doit comporter environ 70 tours. Ajustez proportionnellement les enroulements restants recommandés par le programme : w2 = (70/75) 13 -12 tours ; wvyx = (70/75) 26 - 24 tours. L'inductance réelle de l'enroulement primaire d'un transformateur fabriqué conformément aux paramètres donnés est approximativement égale à 770 μH, ce qui correspond bien au calcul. Pour l'enroulement de sortie, le programme recommande d'utiliser un fil d'un diamètre de 1,8 mm, tandis que la résistance de l'enroulement pour le courant continu sera de 25 mΩ et pour le courant alternatif de 38 mΩ. Malheureusement, l'auteur ne disposait pas du fil requis, il a donc dû être remplacé par un fil existant d'un diamètre différent - 1,5 mm. L'augmentation inévitable de la résistance de l'enroulement et la diminution correspondante de la tension de sortie devront être compensées par une augmentation du nombre de tours 25. Une marge importante de l'échauffement calculé du transformateur (15,5°C par rapport à la valeur admissible 40°C) donne le droit d’espérer la validité d’une telle correction. En complétant le calcul du transformateur, on détermine la tension supplémentaire Udop = (70/25) 27 = 75,6 V, et en tenant compte du rendement - 81,6 V, qui est très proche de celui fixé par le programme, et donc du La fenêtre VIPer (voir Fig. 8 ) ne peut pas être retournée. Passons au choix d'un transistor de commutation. Dans la barre d'outils DS, cliquez sur le bouton Forme d'onde (oscillogramme), après quoi la fenêtre illustrée à la Fig. 13, dans lequel jusqu'à quatre paramètres différents du SMPS peuvent être observés simultanément par choix.
On laisse les deux fenêtres proposées par le système de visualisation des oscillogrammes, et dans la première fenêtre on affichera la dépendance Idrain = f(Vin)@Pmax (dépendance du courant de drain sur la tension d'entrée à consommation électrique maximale), et dans la seconde - Vdrain = f(Vin)@Pmax (tension de drain de dépendance par rapport à la tension d'entrée à consommation d'énergie maximale). En modifiant la tension d'entrée à l'aide du curseur de la barre de défilement, vous pouvez explorer la nature de la transformation de ces paramètres. De ces schémas, les conclusions suivantes peuvent être tirées : pour toutes les modifications admissibles de la tension du secteur et des paramètres de charge, le SMPS conçu fonctionne en mode courant intermittent - ceci est en outre indiqué par l'inscription dans le coin supérieur droit des fenêtres avec oscillogrammes ; l'amplitude du courant de drain du transistor de commutation à la tension secteur maximale est de 2,7 A ; à une tension minimale, l'amplitude du courant reste la même et le rapport cyclique des impulsions de commutation augmente de 0,18 à 0,24 ; la tension maximale au drain du transistor (à la tension maximale du secteur) atteint 640 V. Les résultats obtenus nous permettent de conclure que pour le SMPS conçu, il est permis d'utiliser un transistor à effet de champ KP707V2 ou autre, dans lequel le courant de drain maximum est de 4 A et la tension drain-source maximale est de 700 V. Afin d'obtenir les résultats de la conception automatisée de SMPS, il suffit de cliquer sur le bouton BOM (Bill Of Materials) de la barre d'outils DS (voir Fig. 6), après quoi la fenêtre BOM List apparaîtra (Fig. 14). . Si la liste des éléments doit être imprimée, cliquez sur le bouton Imprimer.
Rappelons que le calcul a été effectué pour un SMPS commuté VIPer, mais en fait il a été assemblé sur la base d'un contrôleur PWM UC3842. Malgré toutes leurs similitudes et similitudes, il existe néanmoins une différence significative qui ne doit en aucun cas être ignorée. Cela est dû au fait que dans le premier cas, la résistance de réglage de fréquence est connectée directement à l'alimentation du microcircuit +15 V, et dans le second - à la source interne d'une tension stabilisée de +5 V. Par conséquent , afin de fournir la fréquence d'impulsion de commutation requise f = 30 kHz à une valeur moyenne du rapport cyclique D = (0,18 + 0,24)/2 = 0,21, il est nécessaire de corriger les valeurs nominales du circuit RC de réglage de fréquence. La fréquence de l'oscillateur dans la puce UC3842 est déterminée en fonction des valeurs nominales du circuit RC par le rapport f-1,72/RC. Le temps tOFF pendant lequel le transistor de commutation reste bloqué (voir Fig. 1) est lié à la période d'impulsion T et au rapport cyclique D par l'égalité tOFF = T(1-D). D'autre part, ce temps est également déterminé par les paramètres du circuit RC : tOFF = RCIn[(0,00063R-2,7)/(0,00063R-4)]. En substituant ces formules puis en potentialisant la dernière égalité, nous obtenons l'équation R = {2,7-4exp[(1-D)/1,72]}/ /{0,00063[1-exp[(1-D)/1,72 ,XNUMX]] }. Sur la base du cycle de service moyen requis D = 0,21, nous obtenons R = 9,889 kΩ et C = 5798 pF. Peut-être que le test de mise sous tension des SMPS montrera qu'ils ont besoin d'un certain ajustement. Pour exclure un écart significatif de la fréquence et du rapport cyclique des impulsions de commutation par rapport à ceux calculés, je recommande d'utiliser un appareil de mesure numérique pour sélectionner une résistance et un condensateur. avec les valeurs requises. Le dispositif développé peut être amélioré, par exemple, en ajoutant la synchronisation de la fréquence de fonctionnement du contrôleur PWM avec une source externe de tension pulsée, l'arrêt à distance du SMPS, une boucle de contrôle de tension de sortie secondaire et un démarrage progressif, utilisant du permalloy de molybdène. , ainsi que les circuits magnétiques GAMMAMET modernes [9]. littérature
Auteur : S. Kosenko, Voronej
Cuir artificiel pour émulation tactile
15.04.2024 Litière pour chat Petgugu Global
15.04.2024 L’attractivité des hommes attentionnés
14.04.2024
▪ Les habitudes de sommeil changent considérablement avec l'âge ▪ Télécommande TV hybride et enceinte portable ▪ Nouveaux résonateurs à quartz miniatures en boîtier SMD ▪ US:E serrure de porte intelligente ▪ Le réchauffement climatique accélère le cycle des pluies
▪ section du site Chargeurs, batteries, batteries. Sélection d'articles ▪ Article Ancien régime. Expression populaire ▪ article Qui a été la première personne à marcher sur la lune ? Réponse détaillée ▪ Article Concentration de force. expérience physique
Page principale | bibliothèque | Articles | Plan du site | Avis sur le site
www.diagramme.com.ua |










 Laissez votre commentaire sur cet article :
Laissez votre commentaire sur cet article :