|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENCYCLOPÉDIE DE LA RADIOÉLECTRONIQUE ET DU GÉNIE ÉLECTRIQUE Support-régulateur pour fer à souder. Encyclopédie de la radioélectronique et de l'électrotechnique
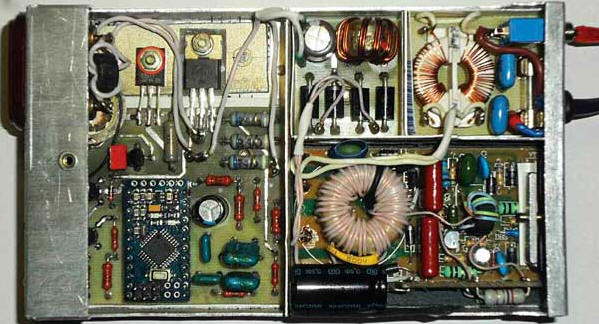
Encyclopédie de l'électronique radio et de l'électrotechnique / Radio-amateur Technologies L'auteur a non seulement créé un dispositif automatique qui régule et stabilise le mode de fonctionnement du fer à souder, mais l'a également placé dans le « sous-sol » du support du fer à souder, économisant ainsi de l'espace sur le bureau. Une triste expérience de longue date de l'utilisation d'un fer à souder 230 V, lorsqu'une rupture de l'isolation entre son élément chauffant et la panne a rendu complètement inutilisable l'appareil de mesure coûteux en réparation, m'a obligé à reconsidérer mon attitude envers les équipements de soudage. Depuis, je n'utilise que des fers à souder 36 V alimentés via un transformateur d'isolement fiable. En fonction de la taille et du poids des composants à souder, j'ai dû utiliser plusieurs fers à souder de puissance variable. L'utilisation des stations de soudage était entravée par leurs grandes dimensions et, bien sûr, par leur coût. Il y a eu des tentatives pour allumer le seul fer à souder via un régulateur à thyristor afin de l'utiliser uniquement dans diverses situations, mais le bourdonnement ennuyeux du transformateur à travers lequel le fer à souder était connecté au réseau nous a obligés à chercher une autre solution au problème. problème. Il n'y a eu aucune difficulté à choisir un fer à souder, car tous ceux que j'avais n'étaient que de 36 V. La conception était basée sur un support pratique pour fers à souder disponible dans le commerce (Fig. 1), dans lequel j'ai essayé d'utiliser rationnellement l'espace vide. du « sous-sol » ».
Le résultat est un support-régulateur universel facile à utiliser pour fers à souder d'une puissance allant jusqu'à 40 W et d'une tension de 36 V. Les principes qu'il contient peuvent également être utilisés pour des fers à souder d'autres tensions en remplaçant certains composants. , en modifiant les données d'enroulement des selfs et en ajustant également le programme. Pour alimenter le fer à souder, un « transformateur électronique » modifié pour lampes halogènes TRS 60 W a été utilisé (Fig. 2), acheté dans un magasin d'électroménager. En conséquence, nous avons dû résoudre le problème de la réduction des interférences et accorder une attention particulière à la sécurité électrique.
J'utilise des microcontrôleurs depuis longtemps, mais cette fois, pour contrôler le fer à souder et réguler sa chauffe, j'ai utilisé pour la première fois le module Arduino Pro Mini avec un microcontrôleur ATmega328A et un résonateur à quartz de 16 MHz, ainsi que le Environnement de développement de programme Arduino IDE conçu pour cela. Le programme développé vous permet de sélectionner cinq modes de fonctionnement du fer à souder en appuyant sur un bouton et de maintenir le mode sélectionné, corrigeant automatiquement l'instabilité de la tension secteur. En utilisant le même fer à souder, le mode 1 peut être utilisé pour travailler avec des soudures à faible point de fusion, par exemple l'alliage de Wood, et le mode 5 permet de chauffer normalement même des composants massifs. Le principe de régulation est basé sur la formule de détermination de la puissance actuelle du réchauffeur du fer à souder P = jeн2 ·Rн, dans laquelle Rн - résistance chauffante ; jeн - la valeur actuelle du courant qui le traverse. Chaque fois que l'appareil est allumé, il mesure la résistance du radiateur du fer à souder et calcule sa puissance à une tension de 36 V, sur la base de laquelle il règle la puissance pour chacun des cinq modes : 20 % - pour le mode 1 ; 40 % - pour le mode 2 ; 60 % - pour le mode 3 ; 80 % - pour le mode 4 ; 100 % - pour le mode 5. Le schéma de principe du régulateur est présenté sur la Fig. 3. La puissance de chauffage est régulée en alimentant le fer à souder avec des impulsions rectangulaires à cycle de service réglable, suivies d'une fréquence d'environ 500 Hz. Comme interrupteur de puissance, un transistor à effet de champ VT4 est utilisé, dont la particularité est une capacité grille-source assez importante. Pour réduire le resserrement des chutes de signal de commande provoquées par la recharge de cette capacité, conduisant à une augmentation de la puissance dissipée par le transistor VT4, les transistors VT2 et VT3 sont conçus.
Impulsions de la sortie D9 du module Arduino via la résistance R3 du transistor de commande VT2. Un niveau logique haut ouvre ce transistor qui, à travers la diode VD1, décharge rapidement la capacité grille-source du transistor VT4 et le ferme. Dans le même temps, le transistor VT3 sera également fermé. Un niveau logique bas de la sortie D9 fermera le transistor VT2 et le transistor VT3 sera ouvert par le courant circulant dans la résistance R8. Le transistor VT3 - un émetteur suiveur avec une faible résistance de sortie - charge rapidement la capacité grille-source du transistor VT4 et l'ouvre. La sortie D8 de l'Arduino est utilisée pour contrôler la LED HL1, qui affiche le mode de fonctionnement actuel du contrôleur et sert d'indicateur des situations d'urgence. A la sortie D7, Arduino génère des signaux sonores fournis à l'élément piézoélectrique HA1. L'entrée D2 est utilisée pour interroger l'état du bouton SB1. Lors de sa sortie, une résistance interne activée par logiciel du microcontrôleur maintient un niveau logique élevé à cette entrée. En appuyant sur le bouton, le niveau baisse. Pour mesurer le courant circulant dans le fer à souder et la tension à partir de laquelle l'appareil forme une séquence d'impulsions fournie au fer à souder, les entrées analogiques du module Arduino A0 et A1 ont été utilisées. Une tension d'impulsion proportionnelle au courant du fer à souder est supprimée des résistances R9-R11. Le filtre R14C8R15C9 en extrait une composante constante proportionnelle à la valeur moyenne de ce courant. Il va à l'entrée A0. Pour mesurer la tension d'alimentation, un diviseur de tension R12R13 avec un filtre de lissage C6R7C5 est utilisé, dont la tension constante est fournie à l'entrée A1. Le module Arduino et l'unité de commande du transistor VT4 sont alimentés par une tension de +9 V provenant du stabilisateur sur le stabilisateur intégré en parallèle DA1 et le transistor VT1. Bien entendu, il serait plus correct d'utiliser un transformateur avec un enroulement secondaire pour la tension requise et un redresseur. Mais par souci de simplicité, la tension +9 V est obtenue à partir de la tension d'alimentation du fer à souder. Il faut admettre que le transistor VT1 s'est avéré être la source de chaleur la plus puissante de l'appareil. Le cordon d'alimentation, ainsi que le cordon du fer à souder, sont de bonnes antennes, capables d'émettre une large gamme d'interférences créées par le convertisseur de tension dans le "transformateur électronique" U1. Pour réduire le niveau d'interférence, un blindage partiel des composants individuels a été utilisé et trois filtres de suppression de bruit en mode commun ont été utilisés sur les selfs à deux enroulements L1-L3. Le premier filtre C1L1C4 empêche les interférences de pénétrer dans l'alimentation. La self L2 est installée directement à la sortie à laquelle le fer à souder est connecté. Le filtre L3C7 réduit le niveau de bruit après le redresseur. Une propriété intéressante de ces filtres est que, sans avoir aucun effet sur la tension et le courant différentiels (déséquilibrés) de fonctionnement, ils atténuent bien les interférences de mode commun (symétriques). Pour utiliser le « transformateur électronique » tRs 60W dans le régulateur, il a fallu le modifier. Le fait est qu'il utilise un retour de courant de charge, ce qui est utile lors de l'utilisation du "transformateur" aux fins prévues, mais pas dans notre cas, car un tel retour réduit considérablement la plage de charge admissible. Avec une charge inférieure à 5...6 W, le convertisseur ne pourrait pas fonctionner du tout sans modification. Cependant, une simple modification lui a donné la possibilité de travailler même sans charge. Toutes les améliorations sont présentées dans un schéma simplifié (Fig. 4). Les chaînes qui doivent être retirées sont marquées de croix. Les circuits et éléments nouvellement ajoutés sont surlignés en rouge et l'enroulement rembobiné II du transformateur T2 est surligné en bleu. La numérotation des éléments dans le schéma est arbitraire et peut ne pas coïncider avec leurs marquages sur la carte de l'appareil.
Tout d'abord, il faut dessouder le transformateur T2 et en retirer l'enroulement II. Pour une plus grande fiabilité et une sécurité électrique accrue, je recommande d'appliquer plusieurs couches de film isolant en plastique fluoré, découpées en bandes de 10 mm de large, sur l'enroulement I, et de placer de fins tubes en plastique aux bornes de cet enroulement. Pour le nouveau bobinage II, j'ai utilisé du fil MGTF-0,35, que j'ai enroulé sur 36 tours. Pour fixer les fils de l'enroulement secondaire, il est recommandé de mettre dessus un tube thermorétractable commun et de le chauffer avec un sèche-cheveux. Après cela, vous pouvez souder le transformateur en place. Une résistance de protection R1 a été installée à l'entrée réseau du convertisseur. Il est recommandé d'installer à la place une thermistance RK1, par exemple S153/10/M ou similaire. Le condensateur supplémentaire C1 et la résistance R2 peuvent être placés sur une petite section de la planche à pain, en la fixant perpendiculairement à la carte convertisseur principale. J'ai fait cela en utilisant un fil de cuivre rigide monoconducteur d'un diamètre de 1,5...2 mm, soudé à un conducteur imprimé, auquel sont connectés la borne inférieure du condensateur C3 et l'émetteur du transistor VT2. Pour réduire l'encombrement en hauteur, la résistance R2 peut être composée de trois résistances connectées en série avec une résistance de 2,2 Ohms et une puissance de 1 W. Du transformateur T1, il est nécessaire de retirer l'enroulement de retour de courant I, qui est un tour de fil passé à travers la fenêtre du circuit magnétique. Un cavalier doit être soudé sur la carte à la place de ce tour. Créez un nouveau circuit de rétroaction à partir d'un morceau de fil MGTF-0,07. Soudez-en une extrémité à la résistance R2, faites deux tours de ce fil sur le transformateur T2 (enroulement III), puis passez-le à travers la fenêtre du circuit magnétique du transformateur T1 (enroulement Ia) et soudez le fil à l'autre borne de la résistance. R2. Si le convertisseur ne fonctionne pas pendant le test, retirez le fil de bobinage Ia du transformateur T1 et faites-le passer à travers la fenêtre du circuit magnétique dans le sens opposé.
Le corps de l'appareil est réalisé en tôle d'aluminium de 1 mm d'épaisseur selon le croquis illustré à la Fig. 5. La largeur et la hauteur du boîtier sont limitées par les dimensions internes du « sous-sol » du support du fer à souder, et sa longueur est 10 mm plus longue que la longueur du support. Aux endroits des coudes de la pièce, découpez des rainures, par exemple avec une lame de scie à métaux. Leur profondeur doit être suffisante pour plier la feuille manuellement avec un certain effort. Ne coupez pas trop profondément, car cela nuirait à la résistance de la structure. Lors du marquage du développement, il ne faut pas oublier que lors des virages, il est nécessaire de prendre en compte l'épaisseur de la tôle d'aluminium. Dans la partie avant (à droite, selon la Fig. 5) du corps se trouve une étagère de 5 mm de large, qui est 2 mm plus haute que le reste du corps. Cette étagère est une sorte de serrure où s'insère la partie avant du support. Dans la partie gauche du corps, selon le croquis, un trou est percé dans lequel un écrou imperdable M2,5 est évasé de sorte qu'après avoir installé la partie avant du support dans la serrure, sa partie arrière bloque au moins à moitié le filetage trou de l'écrou. Pour ouvrir le fil, une encoche est réalisée avec une lime à aiguille ronde en face de l'écrou installé à l'arrière du support. Le support est ensuite fixé au corps avec une vis. Dans la paroi avant du boîtier, des trous doivent être préparés pour les vis M3, qui sont utilisées pour fixer les transistors du convertisseur, pour une bague en caoutchouc pour le cordon d'alimentation et pour l'interrupteur d'alimentation SA1. Vérifiez localement l'emplacement des trous et leur taille en fonction de la disponibilité des pièces et de leurs caractéristiques de conception. Des trous doivent être percés dans la paroi arrière du boîtier pour une prise pour un fer à souder XS1, un bouton SB1 et une LED HL1. Déterminez la position des trous pour le bouton et la LED avant d'installer le dispositif de commande dans le boîtier PCB. Installez la prise dans le coin supérieur droit (selon la Fig. 5) du compartiment du dispositif de commande aussi loin que possible du bas du boîtier, car sous la prise se trouvera une partie du circuit imprimé avec l'émetteur piézo HA1 installé dessus. Pour des raisons de sécurité, je recommande de remplacer la fiche standard du fer à souder par une autre incompatible avec une prise de courant ordinaire, et d'installer une prise correspondant à la nouvelle fiche sur le régulateur comme XS1. Cela éliminera la possibilité de connecter accidentellement le fer à souder au réseau. Réalisez ensuite des écrans séparant les compartiments du boîtier à partir d'une feuille d'aluminium d'environ 0,5 mm d'épaisseur. Leur hauteur doit être la plus élevée possible. Pliez la partie inférieure de chaque écran de 5 mm de large à angle droit et fixez-la au corps avec des rivets à tête fraisée d'un diamètre de 1,5...2 mm. L'utilisation de rivets est due aux petits espaces entre le fond du boîtier et les côtés inférieurs des circuits imprimés. Les espaces entre les bords des circuits imprimés et les écrans doivent avoir une largeur d'au moins 1 mm pour accueillir les boîtiers isolants en bois aggloméré. En haut, selon la fig. 5, parties du compartiment du dispositif de commande, installez une plaque de dissipateur thermique en aluminium pour les transistors VT1 et VT4. Ses dimensions sont de 50x20 mm, épaisseur - 2,5.3 mm. Rivetez la plaque au fond du boîtier, après avoir préalablement lubrifié les surfaces de contact avec la pâte thermoconductrice KPT-8. L'apparence de l'appareil assemblé (sans support de fer à souder installé dessus) est illustrée à la Fig. 6.
Un dessin d'une carte de circuit imprimé de filtre réseau simple face est illustré à la Fig. 7. Un écrou imperdable M1 d'une hauteur ne dépassant pas 2,5 mm est inséré dans le trou de grand diamètre situé sous l'inducteur L3 du côté des conducteurs imprimés et évasé. Il est destiné à la vis qui fixe la carte au fond du boîtier, dans laquelle vous devez percer un trou correspondant.
Pour le fusible FU1, installez les supports S1050 sur la carte. Les condensateurs C1 et C4 sont des K73-17, l'inducteur L1 a été utilisé prêt à l'emploi à partir d'un appareil défectueux. L'inductance de chaque enroulement est de 3,3 mH. Je recommande d'installer des racks de montage dans les trous pour les connexions externes de la carte, par exemple à partir des contacts à broches des connecteurs PLD ou PLS. Avant d'installer le circuit imprimé du filtre réseau dans le boîtier, découpez un flan de boîte dans un carton pressé de 0,5 mm d'épaisseur à la taille du compartiment du boîtier et pliez-le. Les parois latérales du caisson doivent être plus hautes que tous les éléments installés sur la planche. Un tel boîtier est garanti pour isoler le boîtier du régulateur des circuits avec tension secteur sur la carte. Dans la boîte, vous devez faire des trous à l'avance pour le commutateur SA1, le cordon d'alimentation et la vis de fixation de la carte. Après avoir inséré le boîtier dans le compartiment, installez-y le circuit imprimé et fixez-le avec une vis au bas du boîtier. La longueur de la vis doit être telle que son extrémité ne dépasse pas de la surface supérieure de la planche. Ensuite, installez le commutateur SA1 (j'ai utilisé le TNX-01) et la bague en caoutchouc pour le cordon d'alimentation. Un dessin du circuit imprimé du redresseur est présenté sur la Fig. 8. Les conducteurs imprimés sont disponibles des deux côtés. Le condensateur C7 doit pouvoir fonctionner en mode impulsionnel à une fréquence plus élevée. Par conséquent, un condensateur de la série EXR de HITANO est utilisé ici. Vous pouvez également utiliser un condensateur de la série ESG ou des condensateurs similaires d'autres fabricants.
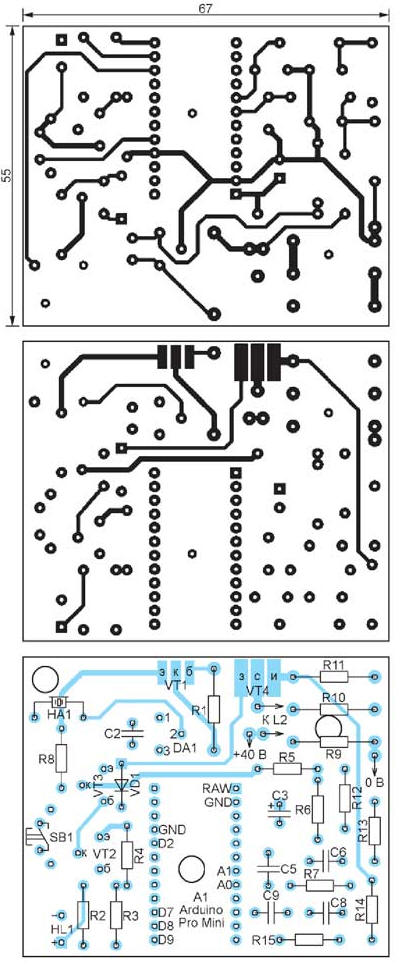
La self L3 provient d'un autre appareil avec une inductance de chaque enroulement de 15 μH. Veuillez noter que les enroulements de cet inducteur fini sont enroulés dans des directions différentes, ils doivent donc être connectés en stricte conformité avec la Fig. 8. S'il n'y a pas d'inducteur prêt à l'emploi, il est facile de le fabriquer vous-même en utilisant un noyau magnétique à anneau de ferrite approprié. Les enroulements sont enroulés avec du fil verni doublement plié d'un diamètre de 0,8 mm en une seule couche jusqu'à ce qu'ils soient remplis. Il est conseillé de s'assurer que l'inductance de chacun des enroulements identiques est d'au moins 15 µH. Les recommandations ci-dessus pour l'installation des racks de montage, l'isolation de la carte avec un boîtier presspan et sa fixation s'appliquent à cette carte. Le même boîtier doit être réalisé pour le « transformateur électronique » retiré du boîtier et la carte convertisseur de tension modifiée. Pour le refroidissement, les transistors du convertisseur devront être pressés contre la paroi avant du boîtier à l'aide de joints isolants, la hauteur de la paroi adjacente du boîtier doit donc être soigneusement sélectionnée. Rendez le reste de ses murs aussi haut que possible. Après avoir installé temporairement la carte convertisseur dans le compartiment qui lui est destiné, vérifiez où les transistors sont plaqués contre le boîtier. Installez ensuite à ces endroits des plaques de mica isolantes d'une épaisseur d'au moins 0,15 mm, pré-lubrifiées avec une pâte thermoconductrice. Les dimensions de ces plaques doivent être 2 à 3 mm plus grandes que les dimensions correspondantes des boîtiers des transistors. Il est nécessaire de souder au préalable les fils d'entrée et de sortie à la carte convertisseur. Entrée - MGSHV, sortie - MGTF-0,35. Après avoir inséré le boîtier isolant dans le compartiment, installez-y la carte convertisseur, après avoir préalablement lubrifié les transistors du côté du contact thermique avec le corps avec une pâte thermoconductrice. Appuyez ensuite les transistors contre la paroi avant du boîtier avec une pince en plastique ou en métal utilisée dans un « transformateur électronique ». Si la pince est en métal, je recommande de placer un joint de presse en dessous pour empêcher la pince de toucher les composants de la carte convertisseur. Le circuit imprimé double face du dispositif de commande est illustré à la Fig. 9. Il offre de la place non pas pour un, comme sur les autres planches, mais pour trois écrous captifs. Il est recommandé de les évaser avant d'installer des pièces dont certaines peuvent chevaucher partiellement les écrous. Après avoir évasé les écrous, vous devez utiliser la planche comme modèle pour marquer et percer les trous de montage au fond du boîtier.
Gardez à l'esprit que le module Arduino Pro Mini possède un connecteur de programmation assez grand et qu'il y a une saillie sur la surface inférieure du support du fer à souder qui peut reposer contre ce connecteur si la carte de commande n'est pas installée correctement. Pour éviter cela, vous devez non seulement être particulièrement prudent lors de l'installation de la carte, mais également insérer les broches du module Arduino aussi profondément que possible dans les trous qui leur sont destinés, et après soudure, couper les parties des broches dépassant du bas. Montez toutes les pièces sur la carte, à l'exception des transistors VT1 et VT4, en n'oubliant pas que les bornes des pièces auxquelles s'ajustent les conducteurs imprimés de part et d'autre de la carte doivent être soudées des deux côtés. Après l'installation, vérifiez la position des trous pour le bouton SB1 et la LED HL1 sur la paroi du boîtier et percez ces trous. Lors de l'installation finale de la carte, vous devez placer un joint de presse en dessous. Après avoir installé la carte de commande, déterminez la position des transistors VT1 et VT4 sur la plaque du dissipateur thermique et percez des trous pour leur fixation. Placez un joint en mica sous le transistor VT4 et fixez-le avec une vis M2,5 avec un écrou en mettant un manchon isolant sur la vis et en plaçant une rondelle isolante sous l'écrou. N'oubliez pas de lubrifier le joint avec une pâte thermoconductrice. Le transistor 2SC3611 a été choisi comme VT1 car son boîtier en plastique peut être fixé au dissipateur thermique sans isolation supplémentaire. Cependant, il est toujours nécessaire d'appliquer une pâte thermoconductrice sur les surfaces de jonction. Soudez les fils des transistors fixés au dissipateur thermique aux plages de contact qui leur sont destinées sur la carte de commande. Pour faire passer les fils entre les planches, réalisez des petites découpes dans les grilles séparant les compartiments. Les fils provenant de la carte de la centrale jusqu'à la prise XS1 doivent passer à travers un anneau de taille standard K10x6x4,5 en ferrite 2000NM1, en les enroulant en deux tours. Ce sera l'accélérateur L2. Il ne reste plus qu'à brancher le cordon d'alimentation. Je recommande d'utiliser un multimètre en mode mesure de résistance pour vérifier la bonne installation et l'absence de connexions électriques entre le corps de l'appareil et ses circuits sous tension secteur. Il ne serait pas superflu de surveiller les circuits de tension secteur et les circuits secondaires du convertisseur pour déceler les courts-circuits. Dans le support du fer à souder, il est nécessaire de remplacer le boulon reliant sa base au ressort par un autre à tête plus plate. Je recommande de coller sur cette tête un coussin isolant en span pressé. A l'opposé du centre du transformateur T2, je recommande de coller un bouchon en caoutchouc à la base du support. Il pressera en outre la carte contre le boîtier et supprimera ses vibrations, ce qui peut entraîner une rupture des bornes des transistors convertisseurs montés sur le boîtier de l'appareil. Pour charger le programme dans le module Arduino Pro Mini, vous avez besoin d'un ordinateur connecté à Internet et d'un programmateur, de préférence avec une interface USB. Accédez au site Web http://arduino.cc et téléchargez-y le programme gratuit Arduino IDE - un environnement de développement de programme pour Arduino. Après avoir installé ce programme sur votre ordinateur, ouvrez le fichier Reg_Sold.ino joint à l'article. Dans le menu "Outils → Carte", sélectionnez "Arduino Pro ou Pro Mini", et dans le menu "Outils → Processeur", sélectionnez "ATmega328 (5V, 16 MHz)". Dans le menu "Outils→Programmeur", vous devez sélectionner dans la liste le programmateur que vous comptez utiliser pour charger le programme dans le module. Commencez à compiler le programme en sélectionnant l'élément de menu "Sketch→Check/Compile". Après une compilation réussie, connectez le programmateur au connecteur de programmation du module Arduino Pro Mini et au connecteur USB de l'ordinateur. La LED1 de la carte Arduino Pro Mini devrait s'allumer. Sélectionnez l'élément de menu "Charger l'esquisse via le programmeur". Si le téléchargement réussit, ce qui sera indiqué en bas de la fenêtre du programme, l'appareil commencera à émettre un bip, après quoi le programmateur pourra être éteint. Il est maintenant temps d'allumer l'appareil et de tester son fonctionnement sans installer le support sur le boîtier. La fiche étant branchée sur la prise secteur, connectez le fer à souder à la prise XS1 et allumez l'appareil avec l'interrupteur SA1. Pour la première évaluation du fonctionnement normal du convertisseur, il suffit d'allumer la LED HL1 de l'appareil, ainsi que la LED LED1 du module Arduino. À l'aide d'un multimètre numérique, mesurez la tension continue entre les fils reliant la carte redresseur à la carte de commande. Elle ne doit pas être inférieure à 36 V ni supérieure à 45 V. Une tension trop élevée entraînera un échauffement important du transistor VT1. Mesurez la tension de sortie du stabilisateur au niveau de l'émetteur du transistor VT1 par rapport au fil commun (la borne négative du condensateur C7). Elle ne doit pas être inférieure à 8,5 V ni supérieure à 9,5 V, sinon la résistance de la résistance R5 doit être sélectionnée. Éteignez l'appareil à l'aide de l'interrupteur SA1 et connectez un multimètre en parallèle au fer à souder en mode de mesure de tension continue à une limite d'au moins 100 V. Après avoir allumé l'appareil, le multimètre indiquera comment la tension sur le fer à souder augmente jusqu’à un maximum. Dans ce cas, la LED HL1 doit s'allumer en continu. Pour accélérer le chauffage, la tension restera au maximum pendant environ une minute. Pendant ce temps, le microcontrôleur du module Arduino calculera la résistance du chauffage du fer à souder en utilisant les valeurs de tension et de courant mesurées. Étant donné que même les fers à souder du même type peuvent avoir des éléments chauffants de résistances différentes, lors du remplacement d'un fer à souder, vous devez éteindre et rallumer l'appareil afin qu'il puisse mesurer sa résistance. Ensuite, l'appareil passera en mode 3 avec un court signal sonore. La LED le signale en clignotant trois fois. Le multimètre affichera une diminution de la tension, que l'appareil commencera à réguler, en maintenant la puissance du chauffage égale à celle réglée pour ce mode. En appuyant sur le bouton SB1, vous devez vous assurer que les cinq modes peuvent être activés. Chaque pression doit être accompagnée d'un signal sonore. Le nombre de flashs de la LED HL1 après celle-ci doit être égal au numéro de mode. Après avoir vérifié avec un multimètre que le processus de régulation de tension n'est pas de nature oscillatoire, vous pouvez passer au mode suivant. Une fois atteint le mode 5, appuyer sur le bouton activera le mode 4 puis par ordre décroissant de numéro. En mode 1, appuyer sur le bouton activera le mode 2 et ensuite le mode 5. Débranchez le multimètre, réglez le mode 3 et vérifiez l'appareil pour détecter une rupture du fer à souder et un court-circuit dans les fils qui y vont. Pour vérifier une cassure, retirez la fiche du fer à souder de la prise XS1 sans éteindre l'appareil. Un signal sonore caractéristique doit être entendu et la LED HL1 doit clignoter deux fois. Après cela, l'appareil vérifiera périodiquement si le circuit du fer à souder a été restauré, en passant au mode défini et en désactivant l'alarme sonore. Si vous réinsérez la fiche du fer à souder dans la prise XS1, l'appareil le détectera et reviendra à un fonctionnement normal. Pour vérifier la détection de court-circuit, débranchez l'appareil, retirez la fiche du fer à souder de la prise XS1 et connectez ses prises avec un fil volant. Après s'être connecté au réseau, l'appareil doit, dès la détection d'un court-circuit, émettre un signal sonore et éteindre brièvement la LED HL1 à deux reprises. Aucune autre vérification des courts-circuits n'est effectuée. Le fonctionnement de l'appareil ne peut être rétabli qu'en coupant puis en rétablissant la tension secteur après avoir éliminé la cause du court-circuit. Les composants utilisés dans l'appareil peuvent être remplacés par des analogues ou des composants présentant des paramètres similaires. Les résistances peuvent être de n'importe quel type indiqué sur le schéma de puissance. Il est recommandé d'utiliser les résistances R5 et R6 avec une tolérance de résistance de ±1 %. Les condensateurs C5, C6, C8, C9 sont en céramique. Pour changer de mode, un bouton tactile TS-A3PV-130 avec un poussoir de 7 mm de long est utilisé. La LED HL1 peut être de n’importe quel type et couleur. Un élément piézoélectrique FTBD-1T-20A3,9 d'un diamètre de 1 mm et d'une fréquence de résonance de 20 kHz est installé comme alarme sonore HA3,9. Si nécessaire, vous pouvez utiliser un élément piézoélectrique avec une fréquence de résonance différente, si ses dimensions ne l'empêchent pas. La nouvelle valeur de fréquence doit être spécifiée dans le programme. Pour ce faire, ouvrez le fichier Reg_Sold.ino dans l'IDE Arduino et recherchez la ligne #définir REZ_FREQ 3900. Dans celui-ci, vous devez remplacer le nombre 3900 par une nouvelle valeur de la fréquence de résonance de l'élément piézoélectrique en hertz. Après avoir compilé le programme modifié, chargez-le dans le microcontrôleur en utilisant la méthode décrite ci-dessus. Programme du microcontrôleur : ftp://ftp.radio.ru/pub/2017/02/reg_sold.zip. Auteur : A. Dymov
Cuir artificiel pour émulation tactile
15.04.2024 Litière pour chat Petgugu Global
15.04.2024 L’attractivité des hommes attentionnés
14.04.2024
▪ LMX243x - synthétiseurs de fréquence basés sur des circuits PLL ▪ Laser utilisant l'effet de la supraconductivité ▪ Système d'alerte de sommeil Sleep Buster ▪ L'hydrogène s'accumule dans l'atmosphère terrestre ▪ Puces de convertisseurs de tension DC-DC haute tension
▪ section du site Appels et simulateurs audio. Sélection d'articles ▪ article de Wendell Phillips. Aphorismes célèbres ▪ article À quoi sert le cuir de veau au Parlement anglais ? Réponse détaillée ▪ article Compositeur manuel. Instruction standard sur la protection du travail
Page principale | bibliothèque | Articles | Plan du site | Avis sur le site
www.diagramme.com.ua |





 Laissez votre commentaire sur cet article :
Laissez votre commentaire sur cet article :