|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENCYCLOPÉDIE DE LA RADIOÉLECTRONIQUE ET DU GÉNIE ÉLECTRIQUE Ordinateur de bord pour vélo électrique. Encyclopédie de la radioélectronique et de l'électrotechnique
Encyclopédie de l'électronique radio et de l'électrotechnique / Maison, ménage, passe-temps Nous présentons à nos lecteurs un ordinateur de bord basé sur un microcontrôleur PIC16F876A avec un capteur de courant externe, conçu pour un vélo électrique. Sur son écran, il affiche à la fois les paramètres de conduite et la tension, le courant, la puissance et la consommation d'énergie de la batterie. L'appareil est réalisé sur une base d'éléments accessibles et est facile à reproduire. Pour surveiller le mode de fonctionnement des vélos électriques, divers instruments de mesure sont utilisés. Les paramètres électriques sont mesurés par des analyseurs de puissance [1, 2], les paramètres de mouvement sont surveillés par divers compteurs électroniques de vélo [3] et même des compteurs de vitesse mécaniques [4]. Il existe même des écrans spéciaux pour les vélos électriques [5], affichant tous les paramètres nécessaires, mais ayant un coût élevé. Sur cette base, j'ai développé un ordinateur de bord pour un vélo électrique sur un microcontrôleur PIC16F876A avec un capteur de courant externe. Principales caractéristiques techniques
La résolution d'affichage du paramètre correspondant est indiquée entre parenthèses. L'ordinateur de bord affiche l'heure actuelle par incréments de 1 minute. Le schéma de l'ordinateur de bord est présenté sur la Fig. 1. Le microcontrôleur DD2 (PIC16F876A-I/P) fonctionne à partir d'un oscillateur stabilisé par un résonateur à quartz ZQ2 d'une fréquence de 8 MHz. Le connecteur XP1 est fourni pour la programmation du microcontrôleur. J'y ai connecté le programmateur PICkit2. Le programme du microcontrôleur a été développé dans l'environnement graphique Flowcode [6].
Les mesures de tension et de courant sont effectuées à l'aide de l'ADC 10 bits interne du microcontrôleur. Lors de la mesure de la tension, le signal du diviseur de tension R5R9R12 est envoyé à l'entrée analogique AN0 (RA0) du microcontrôleur. Lors de la mesure du courant, la chute de tension aux bornes du capteur de courant Rш amplifie l'amplificateur opérationnel OPA241 (DA1). Depuis la sortie de l'ampli-op, le signal amplifié arrive à l'entrée analogique AN1 (RA1) du microcontrôleur. Le gain est réglé en coupant la résistance R13 dans le circuit de retour de l'ampli Op. Au lieu de l'OPA241, presque n'importe quel ampli opérationnel rail à rail dans un boîtier SO-8 peut être utilisé, par exemple, OPA340 ou TS507. Le programme calcule la consommation d'énergie et d'électricité sur la base des valeurs de courant et de tension mesurées. Comme capteur de courant à distance, un shunt de mesure standard 75SHISV.2-0.5-15 avec une chute de tension de 75 mV à un courant de 15 A a été utilisé. En remplacement, vous pouvez utiliser n'importe quel shunt standard avec une résistance de 5... 10 mOhm ou similaire fait maison [7]. L'ordinateur de bord est alimenté par un régulateur de tension linéaire formé du transistor de régulation VT1 et du microcircuit TL431ID (DA2). Un circuit VD1R10C6C7 est installé dans le circuit d'alimentation, ce qui réduit les interférences créées par un moteur électrique en marche. Les résistances R16 et R17 assurent une répartition uniforme de la tension entre les condensateurs C6 et C7. La tension d'entrée maximale admissible (tension de la batterie) dépend de la tension collecteur-émetteur admissible du transistor VT1, de sa puissance dissipée admissible, de la qualité de la dissipation thermique et de la puissance libérée sur les résistances R19-R22. Avec les éléments stabilisateurs indiqués sur le schéma, la tension de la batterie ne doit pas dépasser 75 V. Cependant, l'appareil est capable d'afficher des valeurs jusqu'à 102,3 V sur l'indicateur. L'ordinateur de bord est réalisé sur un circuit imprimé simple face en fibre de verre de 1,5 mm d'épaisseur. Un dessin des conducteurs du circuit imprimé et la disposition des éléments sur celui-ci sont présentés sur la Fig. 2 et fig. 3. Sur la fig. 4 montre son apparence.
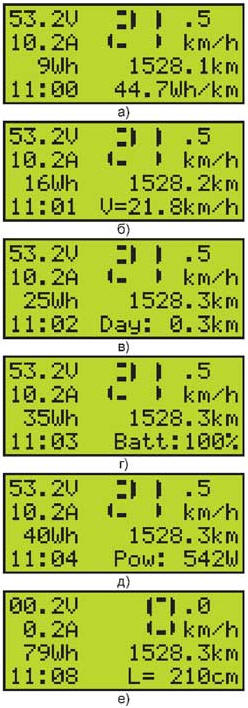
Sur la face avant de la carte se trouvent un microcontrôleur PIC16F876A, un résonateur à quartz ZQ2, une puce d'horloge temps réel DS1307, des résistances d'accord, un transistor VT1, un connecteur XP1 (bloc à broches angulaires PLS-5R) et un bloc PLS-14. pour connecter l'indicateur HG1. La partie correspondante du connecteur, le bloc de douilles PBS-1, est soudée dans les trous de montage de l'indicateur HG14. Une pile au lithium 1V G2032 CR3 est installée dans le support BH-642. Tous les autres éléments sont montés du côté des conducteurs imprimés. Un résonateur cylindrique à quartz ZQ1 (32768 Hz) est soudé dans les trous du côté des conducteurs imprimés à côté des broches 1 et 2 du microcircuit DD1. La partie supérieure de son corps est soudée à un tronçon de feuille relié à un fil commun. La carte de l'ordinateur de bord est fixée à la carte LCD sur deux supports métalliques de 10...12 mm de hauteur à l'aide de vis M3. Des résistances et des condensateurs de taille standard 120b pour le montage en surface sont utilisés. Les condensateurs C6 et C7 sont à oxyde de tantale pour montage en surface dans un boîtier de taille E. Ils peuvent être remplacés par d'autres condensateurs de même taille d'une capacité de 6,8...22 μF pour une tension de 35 V. Les condensateurs restants sont de taille céramique. 1206 ou 0805. Un remplacement du transistor npn BD139 dans un stabilisateur de tension peut être un autre transistor de même structure dans un boîtier TO-126 avec une tension collecteur-émetteur admissible supérieure à 80 V, par exemple BD179, MJE182 2N5192, BF469, KT817G. Une bande de fine feuille de cuivre ou d'aluminium d'une superficie d'environ 6 cm est placée sous le boîtier du transistor.2, servant de dissipateur thermique. Le transistor est fixé à la carte avec une vis et un écrou M3. Pour réduire l'erreur de mesure shunt Rш, doit être situé le plus près possible de la borne négative de la batterie. Toutes les connexions à l'ordinateur de bord peuvent être réalisées avec des fils de petite section. Pour connecter l'interrupteur à lames SF1 (capteur de trajectoire), shunt R à l'ordinateur de bordш, et la batterie GB1, on utilise un connecteur PC7TV non représenté sur le schéma, installé sur le boîtier de l'ordinateur de bord. L'interrupteur à lames provient d'un compteur électronique de vélo en panne. Les paramètres de l'ordinateur de bord sont affichés sur un écran LCD WH1604A à quatre lignes avec une tension d'alimentation de 5 V sans rétroéclairage. Son absence s'explique par le courant élevé consommé par le rétroéclairage (220 mA), ce qui entraînerait une surchauffe du transistor VT1. Sept paramètres sont affichés simultanément sur l'écran LCD : tension, courant, quantité d'électricité consommée, heure actuelle, vitesse, kilométrage total et consommation d'énergie électrique spécifique à partir du moment où l'ordinateur de bord est allumé (voir Fig. 4). La valeur de vitesse est affichée à l'écran à l'aide de pseudographies. Cela a permis de porter la hauteur des chiffres à deux lignes, ce qui a rendu beaucoup plus facile la lecture de la vitesse sur l'écran. L'ordinateur de bord est contrôlé à l'aide des boutons SB1 « M » (réglage des minutes), SB2 « H » (réglage des heures) et SB3 « P » (mode d'affichage). En appuyant successivement sur le bouton SB3 dans le coin inférieur droit de l'écran, au lieu de la consommation spécifique d'énergie électrique (Fig. 5,a), la vitesse moyenne (Fig. 5,b), le kilométrage journalier (Fig. 5,c ), la charge de la batterie (Fig. 5,d) ou la puissance consommée par le moteur électrique (Fig. 5,d).
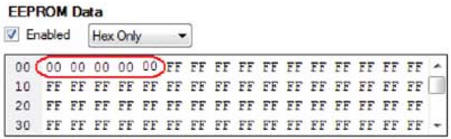
Lorsque vous maintenez le bouton SB3 enfoncé pendant plus de 5 s, le programme entre dans le mode de réglage de la circonférence de la roue (Fig. 5, e). En maintenant enfoncé ce bouton, la circonférence de la roue change par pas de 1 cm allant de 201 à 215 cm (roue de 26 pouces). Lors de la première mise sous tension de l'appareil, la circonférence de la roue est réglée à 210 cm. 5 s après avoir relâché le bouton SB3, le mode de réglage de la circonférence de la roue est quitté et la valeur définie est écrite dans l'EEPROM du microcontrôleur. Lors de la programmation du microcontrôleur, il est nécessaire d'écrire des zéros dans les cinq premières cellules EEPROM (Fig. 6) pour remettre à zéro la valeur initiale de la distance parcourue. Si cela n'est pas fait, le kilométrage sera de 1525,7 km.
Le programme enregistre la distance parcourue dans l'EEPROM du microcontrôleur 3 secondes après l'arrêt du vélo électrique. Pour indiquer le moment de l'enregistrement, un astérisque apparaît dans le coin supérieur droit de l'écran LCD pendant 0,3 s. Lorsque l'alimentation est coupée, le programme réinitialise les valeurs de consommation d'énergie électrique spécifique, de vitesse moyenne et de kilométrage journalier. Pour configurer l'appareil, au lieu d'une batterie, vous pouvez utiliser une source d'alimentation de laboratoire avec une tension de sortie de 25...50 V et un courant de charge admissible d'au moins 5 A. En équivalent de charge, vous pouvez utiliser un puissant Résistance bobinée avec une résistance de 5...10 Ohms. Configurez l’appareil dans l’ordre suivant. Tout d’abord, calibrez son voltmètre. Pour ce faire, la tension est fournie à l'appareil à partir d'une batterie ou d'une source d'alimentation de laboratoire, en la surveillant avec un voltmètre numérique précis. En modifiant la résistance de la résistance d'accord R9, les mêmes lectures sont obtenues entre le voltmètre standard et l'appareil à régler. Le courantomètre est ensuite calibré. Un ampèremètre numérique précis est connecté en série avec la charge. En appliquant la tension d'alimentation et en modifiant la résistance de la résistance d'accord R13, les mêmes lectures sont obtenues entre l'ampèremètre standard et l'appareil à régler. Si nécessaire, la sélection de la résistance R25 définit le contraste optimal de l'image sur l'indicateur. L'ordinateur de bord peut être installé dans n'importe quel boîtier en plastique ou en métal approprié. Fichier de circuit imprimé de l'ordinateur de voyage au format Sprint Layout 5.0 et programme de microcontrôleur : ftp://ftp.radio.ru/pub/2016/05/tripcomp.zip. littérature
Auteur : A. Nefediev
Machine pour éclaircir les fleurs dans les jardins
02.05.2024 Microscope infrarouge avancé
02.05.2024 Piège à air pour insectes
01.05.2024
▪ Capteurs transparents basés sur Gorilla Glass ▪ Chemise intelligente Xenoma e-skin ▪ Le coût de l'électronique automobile est en hausse ▪ Moniteurs iiyama ProLite XU2490HS-B1 et XU2590HS-B1
▪ section du site Outils et mécanismes pour l'agriculture. Sélection d'articles ▪ article Histoire de la pensée économique. Cours magistral ▪ article Quel monarque a été retrouvé tatoué de l'inscription : Mort aux rois !? Réponse détaillée ▪ Article Kudzu. Légendes, culture, méthodes d'application ▪ article Redresseur pour deux tensions. Encyclopédie de l'électronique radio et de l'électrotechnique
Page principale | bibliothèque | Articles | Plan du site | Avis sur le site
www.diagramme.com.ua |




 Laissez votre commentaire sur cet article :
Laissez votre commentaire sur cet article :