|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENCYCLOPÉDIE DE LA RADIOÉLECTRONIQUE ET DU GÉNIE ÉLECTRIQUE Perceuse semi-automatique avec pointeur laser. Encyclopédie de la radioélectronique et de l'électrotechnique
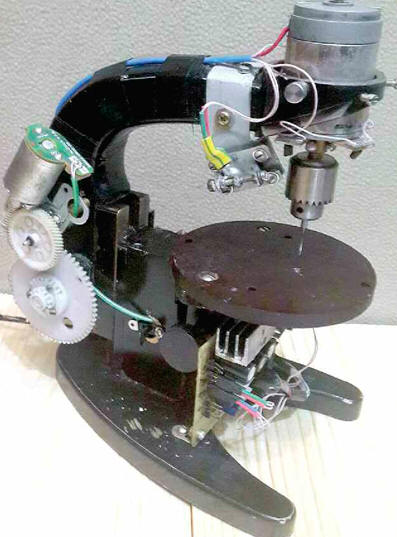
Encyclopédie de l'électronique radio et de l'électrotechnique / Radio-amateur Technologies Pour percer des trous dans les cartes de circuits imprimés, de nombreux radioamateurs utilisent ce qu'on appelle des microperceuses, qui sont un moteur électrique à courant continu miniature avec une pince de serrage fixée à l'arbre. En tant qu'outil de traitement des cartes de circuits imprimés, les microperceuses sont loin d'être idéales : il est assez difficile d'entrer exactement au centre d'un futur trou sans poinçonnage, et il est presque impossible d'obtenir la position verticale exacte d'une microperceuse avec vos mains. Le résultat est un trou « oblique » de mauvaise qualité, dont le centre est déplacé de l'autre côté de la planche, voire un foret cassé (il est particulièrement facile de casser un foret en carbure coûteux, qui est constitué d'un matériau très fragile matériel). Il existe de nombreuses options pour les perceuses sur le marché, mais elles ont toutes une avance de perçage manuelle et un jeu important, et le « support » électronique qu'elles contiennent est uniquement une alimentation et un stabilisateur de vitesse pour le moteur d'entraînement. La perceuse artisanale décrite dans l'article vous permet de percer des trous sans poinçonnage préalable. La logique de son fonctionnement est contrôlée par un microcontrôleur. Les forets en carbure coûteux ne se cassent pas lorsque vous travaillez sur cette machine. Grâce à l'utilisation de tels forets, la qualité des trous est améliorée - ils coupent littéralement le trou, donc après le perçage, il n'est pas nécessaire de poncer la feuille, ce qui rend la fine feuille des conducteurs imprimés encore plus fine. J'ai percé plus de 1500 trous sur cette machine avec un seul foret en carbure (fabriqué en Allemagne) et elle ne s'est toujours pas cassée et continue de percer des trous de haute qualité. Une perceuse bon marché arrête généralement de bien percer après 10 à 20 trous dans de la fibre de verre recouverte d'une feuille, vous devez donc augmenter la vitesse de la perceuse et augmenter la pression lors du perçage, par conséquent, des rouleaux de feuille se forment autour des trous et après le perçage, un traitement minutieux des conducteurs avec du papier de verre est nécessaire. La machine (son apparence à gauche, à droite et à l'arrière est représentée respectivement sur la figure 1-3) est réalisée sur la base du microscope domestique MBI-3 produit par l'association LOMO. Son fonctionnement est contrôlé par une unité de contrôle (CU), dont le schéma est illustré à la Fig. 4. Il est basé sur le microcontrôleur ATtiny45 [1]. Lors de la mise sous tension, l'unité de commande remet la machine dans sa position d'origine, c'est-à-dire que si sa partie mobile était en position basse ou intermédiaire, elle remonte automatiquement vers la position haute initiale. Ensuite, la planche à traiter est positionnée sous le faisceau laser (ils s'assurent que le faisceau laser touche le centre du trou), ils la pressent avec la main contre la table de travail et appuient sur la pédale. En même temps, l'unité de commande alimente le moteur électrique de l'entraînement du mandrin et le moteur d'avance de la perceuse. À la fin du forage, le moteur d'avance du foret ramène la machine à son état d'origine et l'unité de commande coupe l'alimentation des deux moteurs. La machine est prête à percer le prochain trou.
En tant que pointeur laser, un module laser modifié est utilisé, utilisé dans les jouets pour enfants. Il est nécessaire de focaliser le collimateur laser sur une courte distance et de limiter le courant d'alimentation, qui doit être tel que le laser commence tout juste à briller. Cela permet d'obtenir un faisceau plus fin (j'ai pu obtenir un diamètre de faisceau de 0,2 mm) et réduit le rayonnement laser à un niveau sûr. L’ensemble de montage du laser est illustré à la Fig. 5, et les dessins de ses pièces sont sur la Fig. 6. La base 3 et le support laser 4 sont en tôle d'acier d'environ 1 mm d'épaisseur (j'ai utilisé les parois d'un vieux boîtier de CD-ROM). Après avoir percé les trous nécessaires dans les pièces, pliez les pétales rectangulaires du support 4 à angle droit pour fixer la vis avec le module laser. Le module est démonté, la zone de soudure de son corps en laiton et deux écrous M3 sont étamés. Insérez la vis 4 (M5x3) dans les trous des pétales pliés du support 28 et vissez-y les deux écrous 8 de manière à ce qu'ils se trouvent entre les yeux du support (voir Fig. 5). Le corps du laser 2 est inséré sous la vis 5 (entre les écrous 8) et les écrous y sont soudés de manière à ce qu'il s'adapte étroitement au support (cela est nécessaire pour un mouvement sans jeu du laser lorsque la vis tourne pendant le processus de réglage) .
Ensuite, deux autres écrous 5 sont vissés sur l'extrémité saillante de la vis 1 (l'un d'eux sera un contre-écrou) et serrés de manière à ce que les œillets du support 4 ne permettent pas à la vis 5 de se déplacer le long de l'axe . Désormais, lorsque la vis est tournée dans le sens des aiguilles d’une montre et dans le sens opposé, le module laser se déplace d’un œil à l’autre. Pour fixer le support avec le laser à la base 3, quatre écrous sont soudés à cette dernière au verso (ils sont clairement visibles sur la Fig. 2). Ensuite, quatre vis 7 (M3x15) avec rondelles 6 placées sous les têtes sont insérées dans les trous correspondants du support côté laser et des ressorts de compression cylindriques sont posés dessus, après quoi ils sont vissés dans les écrous soudés à la base. Désormais, à l'aide de vis, vous pouvez ajuster la position du laser dans différentes directions. La structure assemblée est essayée sur le support de tube (la partie supérieure du microscope), la tige de la base du support laser est pliée autour d'elle et, à l'aide d'une pointe à tracer, transférant les contours des trous de la base sur le tube support, deux trous d'un diamètre de 2,5 et d'une profondeur de 10 mm y sont percés et un filetage M3 y est découpé. Enfin, fixez la base du support laser au microscope avec des vis M3. Pour alimenter la perceuse, un moteur électrique avec une vis sans fin provenant d'un magnétoscope a été utilisé (j'ai démonté l'appareil pendant longtemps, je ne peux donc pas indiquer son nom). Ce mécanisme (Fig. 7) est fixé au porte-tube du microscope à l'aide de trois poteaux métalliques avec filetages interne et externe M4 et du même nombre de vis M4. L'engrenage est fixé à la poignée du microscope avec trois vis et écrous M2,5 ; les trous des deux parties sont traversants. Des précautions sont nécessaires lors de l'assemblage - le désalignement de l'engrenage et de la poignée doit être minime.
La vitesse d'avance est contrôlée par la résistance de réglage R11. Le moteur électrique utilisé est de faible puissance (tension nominale - 6 V, courant - 30 mA), mais grâce à l'engrenage à vis sans fin, il s'acquitte assez bien de sa tâche. La conception de la boîte de vitesses peut être quelconque, mais doit fournir une force suffisante pour tourner facilement la poignée du microscope. Vous pouvez utiliser un moteur pas à pas. C'est exactement ce que j'ai fait dans le premier projet, mais le moteur pas à pas existant avait un couple insuffisant sur l'arbre et il n'a pas été possible d'en trouver un qui convienne. Si quelqu'un est intéressé par l'utilisation d'un moteur pas à pas, vous pouvez me contacter via les éditeurs. Les fichiers du projet ont été conservés. Il utilisait le microcontrôleur ATmega8. La clé du transistor composite VT5VT6 allume et éteint le moteur d'alimentation de la perceuse (il est connecté à la prise XP6), le transistor VT2 et le relais K1 contrôlent son sens : vers le haut ou vers le bas. La clé du transistor composite VT3VT4 contrôle le moteur électrique de la perceuse (elle est connectée à la fiche XP3), un stabilisateur de vitesse est assemblé sur le microcircuit DA1 et le transistor VT1, et la fréquence est régulée par la résistance de réglage R1. Il ne sert à rien d’utiliser un stabilisateur de vitesse de rotation plus complexe, par exemple, comme proposé dans [2], puisqu’il n’est pas nécessaire de « viser » le foret au centre du trou « à l’œil nu ». Des expériences ont été menées à ce sujet. La puce DA6 contient un stabilisateur de tension d'alimentation pour le moteur d'alimentation de la perceuse [3]. Les stabilisateurs intégrés DA2 et DA5 connectés en série sont conçus pour obtenir respectivement des tensions stabilisées de 12 et 5 V. Le premier d'entre eux sert à alimenter les stabilisateurs de courant sur les microcircuits DA3, DA4, le second sert à alimenter le microcontrôleur et le allumer le transistor VT2. Les condensateurs C2, C3, C6 filtrent, les autres bloquent. La machine utilise un éclairage LED. Le courant de rétroéclairage et le courant laser sont stabilisés : le stabilisateur de courant laser est assemblé sur la puce DA3, et les LED de rétroéclairage sont assemblées sur la puce DA4. Le courant de stabilisation est calculé à l'aide de la formule I = 1,25/R [3] et est réglé en sélectionnant les résistances R13 et R14. Grâce au courant stabilisé, il est possible de connecter en série plusieurs LED de rétroéclairage du même type. Le laser est connecté à la prise XP4, les LED sont connectées au XP5. Le connecteur XP7 est destiné à connecter un programmateur. La fonction de ses contacts correspond au programmateur "TRITON+ V5.7T USB" [4]. Le programme du microcontrôleur a été développé dans l'environnement intégré Code VisionAVR V2.05 [5, 6]. Un capteur à deux positions pour les positions extrêmes supérieure et inférieure de la perceuse et un bouton de démarrage du perçage sont connectés au connecteur XP2. Ce dernier est connecté aux contacts 2 et 4, le capteur de position supérieure - aux contacts 1 et 4, celui du bas - aux contacts 3 et 4. Le capteur et le bouton ont des contacts normalement ouverts qui, lorsqu'ils sont déclenchés, sont connectés à un commun fil. Un fin de course monté dans la pédale fait office de bouton. Le capteur de position est utilisé à partir d'un lecteur DVD d'un centre musical. Le déclenchement du capteur en position basse est réglé de manière à ce que le foret ne descende pas à plus de 1 mm en dessous de la planche en cours de traitement. Le capteur de position supérieure régule la course maximale de la perceuse, cela n'a aucun sens de la faire dépasser 20 mm. Le réglage s'effectue en déplaçant les supports en fil élastique 3 (Fig. 8), fixés avec des vis 6 (M3) sur le support 5. Les vis sont vissées dans des plaques rectangulaires avec filetage à travers une fente du support, ce qui permet pour déplacer les butées de haut en bas. Des plaques filetées, plutôt que des écrous standards, sont utilisées afin que la position des poteaux puisse être fixée dans la position trouvée sans utiliser d'outil pour empêcher les écrous de tourner lors du serrage des vis 6. Les plaques peuvent être soudées aux écrous. Le support est fixé avec les vis 4 au support de tube, et le capteur 2 est fixé à un support en forme de L vissé à la base du microscope. Le dessin du support 5 est montré sur la Fig. 9, comme les pièces du support laser, il est en tôle d'acier.
La tension d'alimentation de la machine dépend du moteur d'entraînement de la perceuse utilisé, mais ne doit pas être inférieure à 14 V. J'ai utilisé un moteur mobile de tête d'impression provenant d'une imprimante à jet d'encre Canon avec une tension d'alimentation nominale de 24 V. La tension d'alimentation de la machine était sélectionné avec une marge de réglage de 30 V. La consommation de courant est totale de l'appareil en régime établi (perçage) - 1,5 A, au moment du démarrage des moteurs, elle augmente brièvement jusqu'à 3 A. Ainsi, l'alimentation doit fournir une tension de sortie de 30 V avec une consommation de courant d'au moins 3 A. J'utilise une alimentation de laboratoire à découpage maison avec un stabilisateur linéaire 0...50 V, 0...10A. La limitation de courant permet un démarrage en douceur des moteurs. Les pièces de l'unité de commande sont montées sur une carte de circuit imprimé en fibre de verre recouverte d'une feuille simple face, réalisée selon le dessin illustré à la Fig. 10. Le motif des conducteurs imprimés est appliqué en exposant une image d'un négatif photo à une feuille de pièce recouverte de résine photosensible. Un photomasque négatif peut être imprimé sur une imprimante à jet d'encre avec une qualité maximale.
Les résistances fixes R3, R7-R9, R15, les condensateurs céramiques C1, C4, C5, C7 (toutes les tailles 0805 pour montage en surface) et le microcontrôleur DD1 (en boîtier SOIC8) sont soudés directement aux conducteurs imprimés. Les résistances restantes sont des MLT-0,25, les condensateurs sont des condensateurs à oxyde importés. Transistors VT1, VT4, VT6 - toutes séries KT805, KT819, VT3, VT5 - VS337, VS547, 2N2222, séries KT315, KT3102 ; VT2 - BC337, 2N2222, n'importe laquelle des séries KT630, KT815, KT972 (la valeur maximale de son courant de collecteur ne doit pas être inférieure au courant de fonctionnement du relais K1). En tant que clé VT5VT6, vous pouvez utiliser un transistor de la série KT829 ou KT972, et pour une clé VT3VT4, vous pouvez utiliser un transistor KT827 ou KT829 avec n'importe quelle lettre d'index. Relais K1 - R40-11D2-5/6, il peut être remplacé par tout autre avec une tension de réponse de 5 V et avec deux groupes de contacts de commutation prévus pour un courant de commutation d'au moins 1 A. Vous pouvez utiliser un relais 12 V en connecter la sortie supérieure (selon le schéma) de ses enroulements (avec la diode VD1) à la sortie (broche 3) de la puce DA2. Le tableau de commande est installé sous la platine et fixé avec des vis M3 à travers les coins jusqu'à la base du microscope (voir Fig. 1). Les puces DA2 et DA5 sont installées sur les dissipateurs thermiques. Il est conseillé d'équiper le transistor VT1 d'un dissipateur thermique. La table est en textolite. Avant de le transformer en perceuse, le microscope doit être démonté, le lubrifiant plutôt visqueux, qui gêne le mouvement du porte-tube (la partie supérieure du microscope), doit être soigneusement lavé et lubrifié avec du lubrifiant liquide, par exemple. , huile de transformateur. Le mouvement de la partie supérieure doit être aussi léger, fluide et sans jeu que possible. Il a été décidé d'abandonner l'utilisation d'une pince classique pour fixer le foret. Un cône Morse et un mandrin à trois mors sont utilisés pour les forets d'un diamètre de 0,3 à 4,5 mm. La connexion entre le moteur et la cartouche doit être fluide. Le point laser sur la planche en cours de traitement est ajusté à l'aide de vis dans l'ordre suivant : un trou est percé dans une plaque en feuille de fibre de verre similaire à celle à partir de laquelle la planche est fabriquée, puis le point laser est ajusté exactement au trou à l'aide du réglage vis du support. Dans ce cas, il faut essayer de ne pas déplacer la plaque. D'après mon expérience, si le point laser disparaissait (n'était plus réfléchi par la feuille), alors le faisceau laser entrait dans le trou et était ajusté. L'épaisseur du stratifié en fibre de verre doit être la même que celle du panneau à fabriquer. Après cela, vous pouvez être sûr que le laser indiquera avec précision le centre du futur trou. Avec des pièces réparables et une installation sans erreur, l'unité de commande n'a pas besoin d'être ajustée. La machine est en service depuis plus d'un an. Pendant le fonctionnement, les deux mains sont libres et il est donc pratique de travailler sur la machine. Je n'ai pas cassé une seule perceuse, même si je fabrique assez souvent des planches, et je ne peux pas imaginer comment j'ai pu me passer de cette machine auparavant. Maintenant, j'achète en toute confiance des forets coûteux de haute qualité. Le forage de 50 trous ne prend pas plus d'une demi-heure. Mais la prudence reste de mise : il existe un risque de casser la perceuse fragile lors de l'installation de la planche sur la table de travail de la machine - en heurtant accidentellement la perceuse. La probabilité que la perceuse se brise pendant le forage est faible, à moins bien sûr que vous ne déplaciez la planche pendant ce temps. Le programme du microcontrôleur, ainsi que des modèles de photos négatives et positives au format .pdf pour transférer le motif des conducteurs imprimés sur un flan de circuit imprimé peuvent être téléchargés de ftp://ftp.radio.ru/pub/2015/07/stanok.zip. littérature
Auteur : I. Parshin
Cuir artificiel pour émulation tactile
15.04.2024 Litière pour chat Petgugu Global
15.04.2024 L’attractivité des hommes attentionnés
14.04.2024
▪ Disque SSD Transcend TS128GMTS810 ▪ Trois cerveaux humains attachés dans un filet ▪ Découverte d'un astéroïde aquatique ▪ Chromebook de jeu Lenovo IdeaPad
▪ section du site destinée au radioamateur-concepteur. Sélection d'articles ▪ article de Georg Christoph Lichtenberg. Aphorismes célèbres ▪ article Quel appareil d'avion contredit complètement son nom d'argot ? Réponse détaillée ▪ article Zopnik épineux. Légendes, culture, méthodes d'application ▪ article Cirage bois bois. Recettes et astuces simples
Page principale | bibliothèque | Articles | Plan du site | Avis sur le site
www.diagramme.com.ua |










 Laissez votre commentaire sur cet article :
Laissez votre commentaire sur cet article :